")
Когда ученые с помощью дистанционно управляемых батискафов исследуют глубоководных обитателей, им необходимы специальные приспособления для того, чтобы безопасно ловить хрупких морских животных, таких как медузы и осьминоги, для более близкого изучения.
Созданный в Гарвардском университете захват для ловли глубоководных организмов (Rotary Actuated Dodecahedron - RAD) предназначен именно для таких целей.
Плоское в неактивированном состоянии устройство состоит из пяти 3D-печатных навесных полимерных «лепестков», которые прикреплены к взаимосвязанным вращающимся шарнирам. При этом вся конструкция приводится в движение всего одним мотором. Таким образом, когда двигатель прикладывает крутящее усилие к точке, где сходятся лепестки, они складываются в полость в форме додекаэдра.
Любое небольшое существо, которое находится непосредственно перед устройством, окажется внутри прозрачной полости, позволяя ученым изучать его с помощью камер подводных аппаратов. Животное впоследствии отпускается, когда составляющие додекаэдр лепестки разворачиваются при включении двигателя.
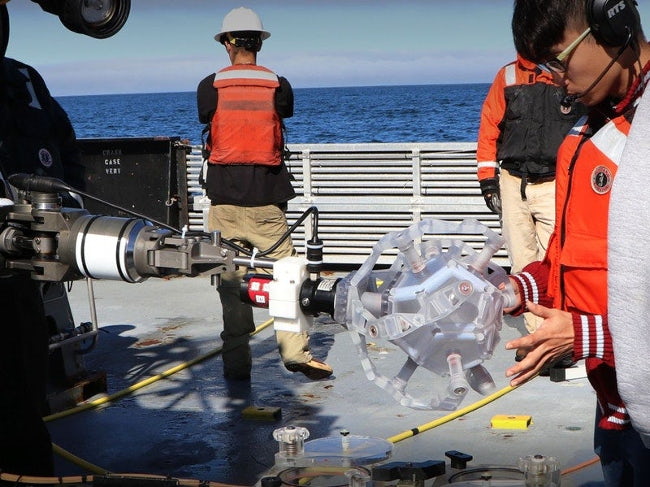
Прототип RAD уже был использован для поимки медуз в аквариуме Мистик, штат Коннектикут. Он прошел испытания в Тихом океане на глубине от 500 до 700 метров, закрепленный на конце манипулятора с дитанционным управлением. Используя для контроля джойстик, оператор сумел захватить и освободить таких животных, как кальмары и медузы, без ущерба для них.
Теперь планируется использовать камеры и другие датчики, встроенные непосредственно в корпус устройства, что позволит ученым получить более четкое и увеличенное изображение морских обитателей, а также собирать такие данные, как геном животного.
«Конструкция пробоотборника RAD идеально подходит для сложных глубоководных условий, потому что очень простое управление и небольшое количество элементов минимизируют возможность поломки. А модульный принцип позволяет легко производить замену и отправлять аппарат обратно под воду», - говорит Чжи Эрн Тео, разработчик устройства. Этот складной принцип также хорошо подходит для использования в космосе, который похож на глубины океана в условиях слабой гравитации и агрессивной среды, что усложняет управление любым устройством.
Комментарии
(0) Добавить комментарий