
16.01.2026

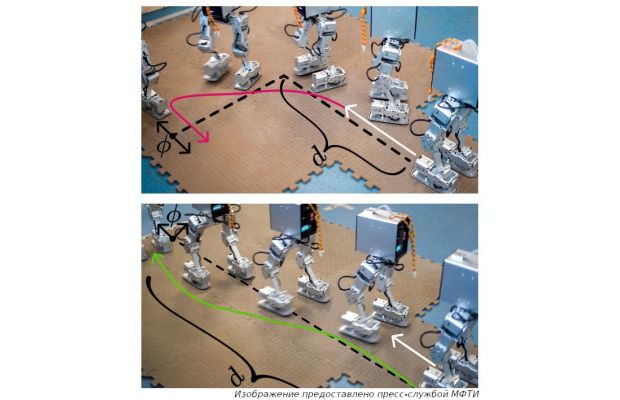
Он автоматически подстраивается под диаметр трубы и благодаря особой конструкции колес не застревает на поворотах. Ключевое преимущество — устройство работает в трубах вдвое меньшего диаметра, чем аналоги.
16.01.2026
24.10.2025
10.07.2025
01.07.2025

27.06.2025

21.05.2025
30.01.2024
10.01.2024

07.12.2023

24.11.2023