
Друзья, представляем вам доклад ведущего специалиста Инновационного центра трансфера технологий СамГТУ Синицы Владислава Владимировича, с которым он принял участие в конференции MarineRobotics2019.
Аннотация
Доктрина развития ВМФ РФ основана на догмах конца 19 века, а не современных реалиях. Строительство боевых единиц флота и береговой инфраструктуры ведется без системного анализа тактики противника с учетом развития его робототехнических надводных, подводных и воздушных средств разведки, минирования и ударных возможностей.
Минимизация размеров ядерных боеголовок с целью последующей их установки вместо конвенциональных на существующее огромное количество (и рост их числа продолжается) крылатых ракет морского базирования большого радиуса действия позволяет наносить противнику внезапные превентивные глобальные «обезоруживающие» удары вне действия наших сил флота, береговых ракетных расчетов, ПВО и противолодочной авиации.
В то же время, абсолютное превосходство противника в авиации, ДРЛО, противолодочных средствах и силах подводного флота в значительной степени снижают возможность ответного удара морской составляющей ядерной триады российской армии, ее выживаемость в первые минуты начала агрессии. Эта мизерная вероятность продолжает неуклонно падать с развитием вышеуказанных экономичных, но эффективных военизированных робототехнических средств. При неизменности курса развития отечественного флота у противника может появиться чувство безнаказанности и жгучее желание воспользоваться имеющимся преимуществом для развязывания войны.
Восстановить баланс сил на море и повысить обороноспособность страны в короткие сроки и с минимальными расходами можно только при изменении доктрины флота и внедрения альтернативных, т. н. «асимметричных» робототехнических устройств, которые поменяют существующую тактику «бесперспективной попытки отражения удара» на - «непрерывное слежение за носителями оружия агрессора с незамедлительным их уничтожением в случае начала удара по РФ».
Предлагаемая тактика реализуется с помощью нескольких составляющих, одной из которых является система противолодочной обороны (ПЛО) «Облава». Она в свою очередь состоит из совокупности роботизированных устройств (обширных распределенных сетей из них), объединенных по функциональному признаку на «следящую» и «ударную» компоненты, хотя даже внутри данных групп имеются большие различия в конструкциях аппаратов и способах их применения.
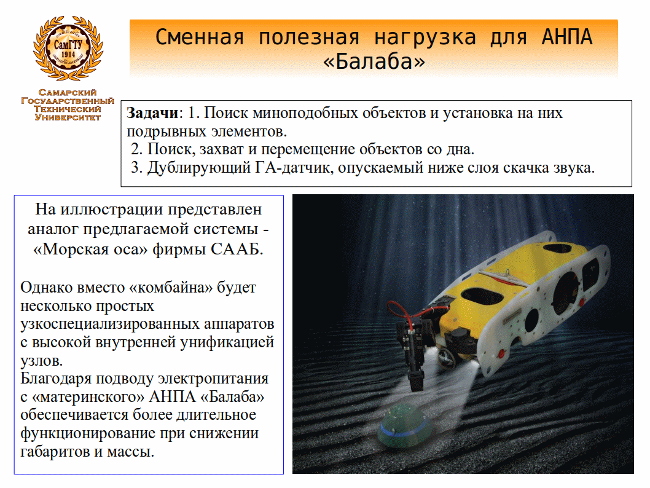
Об одном из таких роботизированных АНПА «следящей» за противником компоненты под условным названием «Балаба» и пойдет речь в данной статье. Для повышения автономности плавания его предполагается оснастить двигателем Стирлинга на солнечной энергии в дополнение к аккумуляторным батареям.

Введение
Бурное развитие в последние годы за рубежом роботизированных (беспилотных и безэкипажных) устройств обусловлено минимизацией размеров и снижением энергопотребления электроники, входящей в состав данных аппаратов, а также систем сбора и анализа информации об окружающей обстановке.
Так называемый «искусственный интеллект» (ИИ) в виде непрерывно совершенствуемого программного обеспечения в игровой манере позволяет проработать множество вариантов поведения данных устройств во всевозможных ситуациях с различным набором «соперников»-комбатантов [1].
Все это дает возможность оптимизировать конструкции и тактическое взаимодействие групп роботов, в том числе и разносредных, а также индивидуальное ведение боевых действий в условиях отсутствия связи с другими членами «команды».
В скором времени на них будут возложены задачи по разведке, минированию, сигнально-поисковым функциям, имитации (ложных целей) и созданию помех навигации и коммуникации противника.
Морские робототехнические устройства имеют большое преимущество перед воздушными и сухопутными в плане скрытности передислокаций (при перемещении на глубине) и автономности благодаря использованию энергии ветра, волн и Солнца для движения и работы встроенной аппаратуры. Благодаря «архимедовой силе выталкивания» миниатюрные АНПА могут быть носителями мощных вооружений для нанесения непоправимого ущерба даже крупным военным кораблям и ПЛ.
Все эти качества делают морскую робототехнику наиболее важной компонентой для защиты своих границ и суверенитета, если есть вероятность нападения авиационных группировок или ракетного обстрела с удаленных участков моря, где собственные боевые корабли и авиация будут лишь мишенями для противоборствующей стороны.
1. Цель работы
Создание автономно функционирующих длительное время распределенных сетей роботизированных аппаратов на значительном расстоянии от береговой линии с выполнением каждым из их подвидов лишь ограниченного круга задач (для снижения себестоимости изготовления и повышения боевой устойчивости), но направленных на решение общей их совокупности: сдерживание флота противника на подступах к границам, сигнализирование о его маневрах и начале агрессивных действий, незамедлительное уничтожение наиболее опасных носителей вооружений в случае начала войны.
Дополнительными областями применения робототехнических морских средств станут борьба с аналогичными АНПА противника, непрерывный поиск и уничтожение мин, спасательные операции и пр.
2. Формулировка задачи
2.1. Анализ мирового опыта
Как выше уже было сказано, за рубежом идет усиленный поиск оптимальных конструкций всевозможных размеров и формы АНПА, способов их передвижения и получения энергии из возобновляемых источников; уже проводят учения по поиску ПЛ данными аппаратами [2], выделяются многомиллионные суммы учебным заведениям на активизацию работ по привлечению большего количества студентов и ученых к решению данных проблем и поискам оригинальных идей [3].
Несомненно, прилагаемые усилия дают эффект, однако пока в открытых источниках информации даже нет намека на конструкции АНПА, разработанные нашей инициативной группой. То есть, давление авторитета «маститых» разработчиков и сворачивание на путь модернизации стандартных (само-собой_разумеющихся) схем вызвали некоторую зашоренность и застой в развитии иностранных конструкций АНПА — этим и нужно воспользоваться для отрыва в плане потребительских качеств.
2.2. Состав функциональных компонент противолодочной системы «Облава»
Укрупненно, систему ПЛО «Облава» можно подразделить на «следящую» компоненту и «ударную». Первая является составной частью единой государственной системы освещения надводной и подводной обстановки (ЕГСОНПО), которая обеспечивает прием информации извне и ее самостоятельный непрерывный поиск, а затем осуществляет передачу этих данных гидроакустическим способом и/или радиосигналами о координатах и составе надводных и подводных плавательных средств, а также воздушных летательных аппаратов (ЛА).
Кроме «обозревания окружающей обстановки» устройства данной компоненты обеспечивают и навигацию подводных аппаратов «ударной» составляющей, которые на поверхность практически и не всплывают для максимальной скрытности (находясь в режиме «спячки» до пробуждения кодированными сигналами от «следящей» компоненты в час «Х»), т. к. несут разнообразное вооружение.
Роботизированные морские средства не защищены никакими международными законами, поэтому будут подвергаться неминуемым кражам, на языке юристов - «изменению собственника». Отсюда непреклонное требование: поверхностные аппараты должны быть либо минимизированы по стоимости (как массовые дешевые навигационные глайдеры — своеобразная морская сеть «Глонасс»), либо быть громоздкими и опасными, чтобы предотвратить хотя бы корыстный умысел хищения. Подобными «брутальными» качествами и обладает концептуальное полупогружное судно «Балаба» с двигателем Стирлинга на солнечной энергии.

3. Концепция
3.1. Конструктивные особенности
Кратко суть концепции АНПА «Балаба» можно изложить как: полупогружное судно катамаранного типа (Рис.1) с возможностью подводного планирования, оснащенного электроприводом от аккумуляторных батарей (АКБ) и двигателя Стирлинга на солнечной энергии. Имеется подъемная мачта-антенна с панорамным видоискателем и необходимый набор навигационной аппаратуры. В качестве поисковых средств используются как гидролокаторы бокового обзора на корпусах «Балабы», так и гидроакустические датчики и видеокамера на кабельном АНПА, мотор-лебедка которого закреплена между корпусами «Балабы». Аккумуляторные батареи и основной электронный блок (два — для дублирования) расположены в герметичных контейнерах внутри трубчатых корпусов «Балабы» - они же емкости охлаждения для малотоксичного (умеренно опасного по ГОСТ 12.1.007-76) рабочего тела двигателя Стирлинга. Наружная поверхность «Балабы» в момент подзарядки АКБ возвышается над уровнем моря на 0,1…0,15м. Мачта поднимается при необходимости сеансов связи и ведения наблюдения.
Подводное (глайдерное) планирование требуется данному аппарату для перехода к месту боевого дежурства и обратно, преодоления оживленных транзитных маршрутов транспортных судов и мест интенсивного рыболовства, а также как защита от неправомочного завладения и уничтожения. Глубина погружения — до 100м.
В качестве средств маскировки будут изготавливаться дешевые пластиковые макеты, имитирующие лишь контур (проекцию) «Балабы»: основным их «врагом» считаются ЛА, в частности беспилотные. Создание множества ложных целей в угрожаемый период и будет одной из тактик защиты «Балабы».
3.2. Технологические ограничения
Несмотря на большую разновидность двигателей Стирлинга имеющихся запатентованных конструкций, предлагаемый для «Балабы» отличается рядом моментов. Поэтому можно только прогнозно заявлять его КПД (около 20%) и другие параметры — необходимо провести большую часть научно-исследовательских работ для воплощения данного двигателя. Зато будет мировой приоритет в этом престижном направлении возобновляемых источников энергии.
Есть еще несколько нюансов для реализации подхода «москитного» оружия, т. е. массовое производство изделий по минимальной стоимости — этот принцип абсолютно антагонистичный существующей практике отечественного ВПК: единичные «топорные» устройства по цене самолета. В общем, необходимо будет тщательно сбалансировать категории «функциональность — стоимость — серийность».
3.3. Варианты эксплуатации
Как у элемента «следящей» компоненты у «Балабы» должны быть хорошо развиты органы «чувств»: оптические, гидроакустические магнитные и электрические. В зависимости от категории использования — ПЛО или ПМО — будет преобладать тот или иной набор датчиков, их разрешающая способность.
Например, при дежурстве вдали от собственных берегов (300-1000км) основной задачей будет индикация прохода ПЛ и корабельных группировок противника, его надводных беспилотников (типа АКТУВа), вычисление координат районов старта ракет.
Для этого «Балаба» будет оснащена низкочастотными ГА приборами, а АНПА на кабеле опускаться ниже зонального скачка звука для улучшения фильтрации принимаемых сигналов. Связь нескольких «Балаб» в одном районе дежурства (15-20км) через антенны и обмен данными позволит создать распределенную конформную ГА-антенну для более точного определения координат целей.
Аналогичные задачи вблизи своих побережий (100-300км) будут дополнены поиском небольших роботизированных подводных устройств чужеродного происхождения, что потребует более частого использования активного режима ГА излучения (в дальней зоне — только по запросу Центра и в угрожаемый период). Это позволит использовать способ зондирования «напросвет» (в противоположность эхолокации), когда широкополосная ГА-посылка синхронизируется с радиосигналом для других «Балаб» в районе дежурства, что даст возможность определять аномалии малых размеров, не издающих собственных звуков.
Дабы не перегружать встроенные процессоры лишней работой и энергопотреблением (!), получаемую информацию сеть «Балаб» может «сбрасывать» на ближайший экипажный корабль или периодически пролетающий БПЛА для ретрансляции на берег, где уже будут задействованы более мощные алгоритмы и компьютеры.
В полосе до 100км от берега поиск миниатюрных АНПА будет сведен к противоминной обороне с постоянным и непрерывным поддержанием 4D картографирования дна и водной толщи. В отличие от существующего «упорядоченного» поиска донных мин сплошными участками, проходы «Балаб» будут несколько хаотичными (труднее «сшивать» разрозненные исследованные области), зато более неожиданными для противника, который уже (!) технически в состоянии обеспечить размещение подвижных мин на якобы только что проверенные (тральщиками с БЭКами) участки (определяя их, стоя чуть в стороне мест траления, по галсам перемещения ГА сигналов БЭКов и «Галтелей»).
Самым «грустным» моментом для эксплуатирующей организации будет то, что «Балабы» не потребляют углеводородного топлива. Зато должны быть довольны «зеленые» и финансисты, которые смогут заполнить графу «Экономия госбюджета» реальными многомиллионными цифрами.
Зарядку АКБ, помывку, проведение техобслуживания (ТО), замены ПО и прочего постараемся максимально автоматизировать, а сами посты ТО вынести за пределы портов — как и любого другого «москитного» оружия, «Балаб» потребуется значительное количество.
Еще раз напомним, что «Балабы» не будут действовать в одиночку: их синергетически будут поддерживать на каждом участке боевого дежурства и другие роботизированные аппараты, описание которых пока преждевременно.
4. Аргументы целесообразности
4.1. Недостатки существующих подходов
Тысячелетняя практика истории дает нам однозначную картину всех предшествующих войн, когда противник всегда нападает первым и неожиданно. Поэтому дилетантские проведения учений дуэльного варианта или поиска ПЛ без ее прикрытия авиацией и кораблями противоборствующей стороны являются самоуспокаивающими «микстурами» для душевнобольных.
Перед нападением противник развернет в прибрежной зоне сотни АНПА с минным и торпедным оружием, разведывательным и целеуказательным оборудованием; подключит к удару союзнические малошумные ПЛ с ВНЭУ и на литиевых аккумуляторах; сосредоточит большие силы флота и авиации (включая разведывательную, ПЛО и БПЛА) под видом учений или устрашения какой-либо пограничной страны.
В результате одновременного удара вся отечественная авиация ПЛО, находящаяся в этот момент в воздухе будет уничтожена, как и единичные группы кораблей вдали от береговой ПВО, аэродромы разрушены. Остальным силам флота и ПЛ не позволят выйти с военных баз минные заграждения и малошумные ПЛ, а осуществляющие дежурство — потоплены за счет постоянного слежения за ними роботизированными средствами, типа АКТУВ, и самолетов противолодочной авиации и других средств ПЛО [4].
Запускаемые в ответ на агрессию крылатые ракеты с выживших от массированного удара кораблей (вероятность этого слишком мала) и береговых комплексов будут легко перехвачены ввиду легкости локализации мест их пуска и траектории, а для части прорвавших систему ПРО - подставят ложные цели в виде танкеров и контейнеровозов.
Тактика дрожащего кролика перед удавом еще ни разу не приносила победу ни в одной войне. Противник всегда будет держать нас в перекрестии прицела — не стоит легкомысленно поворачиваться к нему спиной в расчете на его благочестие. Переложим заботы о присмотре и наказании его за противоправные действия на неутомимых и не подверженных предательству «роботов».
4.2. Преимущества предлагаемой концепции
Вместо размещения всего боезапаса на единичных кораблях и локализации его в портах возле пирсов, где и проводят большую часть времени отечественные корабли с КОНом (коэффициентом оперативной напряженности) порядка 0,2 (а еще больше - в разговорах о проектировании и постройке, далее — в ремонте и утилизации), предлагается рассредоточить его на «москитных» ударных устройствах подводного базирования с распределением их сетями с различной концентрацией насыщения вдали от собственных берегов.
Оперативное целеуказание на объекты противника им будут передавать надводные роботизированные устройства (включая «Балабу») с некоторой периодичностью, зависящую от уровня напряженности.
Таким образом, противнику будет значительно труднее одномоментно вывести все ударные силы из строя, при том, что они могут атаковать и «со спины», то есть с тыла; а превентивное уничтожение им «следящей» компоненты и станет однозначным индикатором начала агрессии — это «смажет» эффект неожиданности.
Следовательно, не имея больших шансов на скорую победу, противник не станет атаковать — значит тактика сдерживания роботизированными устройствами (при стоимости меньшей, чем существующими экипажными кораблями) принесет свои плоды.
4.3. Вариант решения задачи
Полупогружное судно «Балаба» является одним из роботизированных средств слежения за ПЛ и поиска АНПА и мин, как стационарных (якорных и донных), так и подвижных. Причем, для повышения автономности дежурства и снижения стоимости эксплуатации данный АНПА снабжен двигателем Стирлинга, работающего на энергии Солнца.
Дополнительный АНПА на кабеле с ситуативным оборудованием позволяет «Балабе» решать целый комплекс задач с минимальной модификацией, что положительно сказывается на унификации устройств, массовости их производства, а в целом — сокращении затрат на поддержание обороноспособности страны.
Боевая устойчивость обеспечивается за счет малозаметности самой «Балабы», возможности ее подводного передвижения путем планирования, а также с использованием в угрожающий период множества дешевых ложных целей. Для уменьшения корыстной привлекательности в двигателе Стирлинга используется малотоксичное рабочее вещество и дешевые аккумуляторные батареи, а габариты и масса превышают возможности грузоподъемных механизмов небольших рыболовецких судов.
При выявлении буксировки включаются другие защитные механизмы, вплоть до повреждения внутренних узлов.
Двигатели Стирлинга в виде унифицированных блоков могут быть использованы и в гражданских изделиях, например, развозном тримаране на полном электродвижении (совместно с солнечными батареями и аккумуляторами) по типу Energy Observer [5]. Это позволит снизить стоимость разработки и проводить бесшовную конверсию высокотехнологичных изделий.
Выводы
- Осуществлен анализ направлений развития подводных роботизированных АНПА и подходов реализации их концепций различными группами разработчиков.
- Найден уникальный вариант для решения целого комплекса задач с минимальными затратами на производство и эксплуатацию.
- Выбраны варианты оснащения АНПА «Балаба» ситуативным оборудованием.
- Намечена бесшовная конверсия разрабатываемого двигателя Стирлинга для гражданских изделий.
- Производится поиск отечественных компаний для совместного финансирования разработки, изготовления опытного образца и проведения испытаний, а также на предмет владения интеллектуальной собственностью.
Ведущий специалист Инновационного центра трансфера технологий СамГТУ Синица Владислав Владимирович, vlad_sin@mail.ru
Список источников:
1. ИИ DeepMind освоил командную игру и превзошёл человека. https://3dnews.ru/988452
2. Американцы создали роботов для охоты за подлодками. https://life.ru/t/%D0%BD%D0%B0%D1%83%D0%BA%D0%B0/926473/amierikantsy_sozdali_robotov_dlia_okhoty_za_podlodkami
3. Проект «Океан 2020» https://www.vpk-news.ru/news/48337
4. Ведение «мозаичных» боевых действий по замыслу DARPA. https://3dnews.ru/987294
5. Катамаран Energy Observer на электродвижении. http://www.energy-observer.org/
Комментарии
(0) Добавить комментарий