
Исследователи из японского университета Окаяма в сотрудничестве с промышленными партнерами разработали инновационного подводного робота, включающего интеллектуальную технологию с датчиками CCD для распознавания трехмерных объектов, используемую для автономного поиска и слежения в течение длительного времени на открытой воде.
"Наш автономный подводный аппарат (АПА) работает с использованием новой технологии зондирования на основе трехмерного визуального зрения с датчиками CCD, стерео зрения в режиме реального времени и зондирования обычными сонарами», - объясняет Мамору Минами, профессор университета Окаяма. «Подводная навигация с таким сочетанием датчиков звука и 3D видео позволяет нашим АПА искать и отслеживать малоразмерные цели с точностью до 5 мм. Мы ожидаем, что эта точность будет повышена до 0,5 мм, чего мы добились для наземных роботов".
Ожидается, что АПА университета Окаяма найдет применение в различных областях, в том числе при дезактивации радиоактивно загрязненного дна морей, океанов и озер; при геологоразведке океанского дна с целью поиска таких материалов, как гидрат метана и редкоземельные металлы; при техническом обслуживании подводных телекоммуникационных кабелей; для экологического мониторинга и исследований жизни моря; при поиске подводных мин; сборе космического мусора; в спасательных операциях.
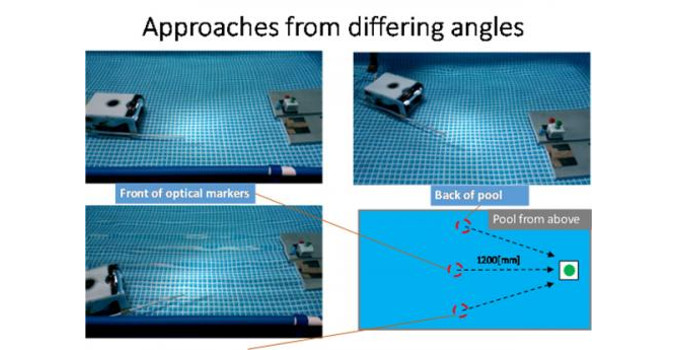
Прототип АПА был протестирован в экспериментальном бассейне размером 2 м в длину, 3 м в ширину и 0.75 м в глубину. АПА успешно состыковался с мишенью, имеющей отверстие диаметром 7 см, предназначенное для имитации зарядного блока для батарей АПА. "Две CCD камеры системы машинного зрения расположены в передней части робота, чтобы отслеживать оптические сигналы-маркеры, испускаемые источником света на мишени ", говорит Минами. "Мы используем сравнительные алгоритмы для определения соответствия получаемых реальных изображений с заданными 3D моделями цели. В конечном итоге, реальная зарядка не потребовалась бы. Мы можем использовать систему подзарядки на индукционной основе, что упрощает этот процесс".
Примечательно, что робот движется автономно, учитывая изменения в положении цели, с возможностью отслеживания движущихся со скоростью до 10 мм/сек целей."Мы можем предусмотреть ряд других применений наших роботов, не связанных с подводной деятельностью", говорит Минами. "Например, при стыковке космических аппаратов и при использовании автономных роботов в процессе постройки базы на Луне. Это действительно многообещающее изобретение с большим потенциалом ".
Комментарии
(0) Добавить комментарий