")
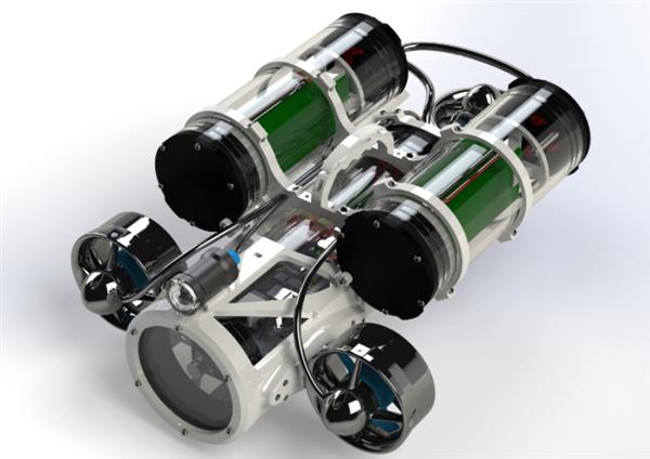
Молодые учены Инсбрукского университета разработали и распечатали на 3D-принтере автономный подводный аппарат (АПА). Он был назван ArcheoRov и способен погружаться на глубину до 100 метров для видеосъемки. Данное устройство может быть использовано экологами, биологами и даже сотрудникам поисково-спасательных команд.
Разработчиками ArcheoRov стала команда студентов из города Роверетто и группа молодых ученых из Инсбрука, известная под названием «Arc Team», совместно с итальянским печатным бюро Witlab 3D. В течение 10 недель инженеры спроектировали и изготовили во многом уникальный аппарат, поскольку он является единственным в своем роде устройством, состоящим из 3D-печатных частей. Кроме того, ArcheoRov предназначен для передвижения в воде, а не статической съемки.
Как рассказал сотрудник Witlab 3D, доктор Эммануэле Рокко, еще одной важной особенностью ArcheoRov является его способность ориентировать свое тело вверх или вниз, чтобы найти идеальный ракурс для любой из двух камер, что делает устройство более подходящим для некоторых проектов по сравнению со стандартными АПА.
Так как ArcheoRov предназначен для использования в труднодоступных местах, например, в пещерах или затонувших кораблях, его размеры невелики. Под корпусом находятся две батареи 130 Вт, устойчивые к повышенному давлению, которые питают три компактных электрических двигателя малой тяги: два спереди и один на задней стороне. Это позволяет аппарату транспортировать буй с Wi-Fi-аппаратурой.
Как уже упоминалось, ArcheoRov не мог быть создан без помощи 3D-печати, которая была использована для изготовления прототипов ранних конструкций. Команда студентов получила полный доступ к ресурсам и решениям Witlab 3D, где молодые ученые смогли распечатать пластиковый корпус транспортного средства. Исходный прототип выбирался из трех вариантов и изготавливался около 4 недель, а оставшееся время было потрачено на уточнение конструкции и установку электроники и моторов. Первое плавание ArcheoRov совершил в альпийском озере в Трентино, которое расположено на высоте 2400 метров. Пока эта версия устройства может погружаться до 100 метров, но в будущем разработчики обещают собрать аппарат, способный достигать глубины погружения 350 метров.
Интересно, что команда выполнила весь проект с открытым исходным кодом, что позволяет инженерам и ученым, создающим подобные устройства, уточнить и модернизировать АПА по своему усмотрению с помощью операционной системы для роботов (ROS) и набором программных библиотек.
Команда ArcheoRov уверена, что доступное устройство привлечет внимание к проекту самые различные организации. Эммануэле Рокко отмечает, что морские биологи, специалисты по охране окружающей среды, поисково-спасательные команды могли бы извлечь выгоду из использования нового устройства, которое может функционировать как своего рода подводный беспилотник.
Комментарии
(0) Добавить комментарий