
Разработчики Пермского Политеха создают систему управления роботом, который будет заменять неработающие светильники. Искусственный интеллект повысит качество их обслуживания и позволит избежать травмирования людей: сейчас эти работы проводят на высоте в неблагоприятных погодных условиях.
Ориентироваться в пространстве роботу помогут алгоритмы машинного обучения и нейронные сети. О разработке ученые рассказали на международной конференции International Conference on Applied Innovation in IT.
– Сейчас светильники на улицах меняют на высоте от 8 до 15 м. При этом работы проводят при наличии осадков, ветра или низких температур. Из-за замены светильника транспортная сеть становится более загруженной. Специалисты не могут провести полную диагностику неисправностей, так как работают в неудобном положении и ограничены во времени и инструментах. Один робототехнический комплекс позволит заменить несколько бригад, которые обслуживают освещение, – рассказывает один из разработчиков, магистрант электротехнического факультета Пермского Политеха Павел Сливницин.

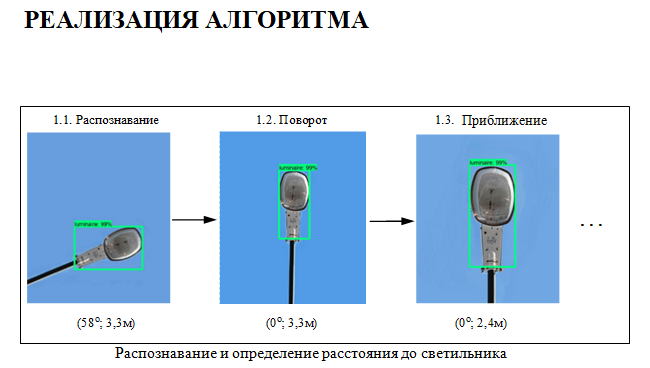
Чтобы «научить» робокомплекс ориентироваться в городе и взаимодействовать с объектами реального мира, ученые разработали для него алгоритм работы. Искусственный интеллект распознает фонарь на изображении, которое делает видеокамера робота, и направляет его манипулятор для замены светильника. Алгоритмы и нейронные сети позволяют роботу решать эти задачи в условиях различной видимости, на разных фонах и в ситуации, когда объект чем-либо заслонен.
Робокомплекс доставляют до фонаря на автомобиле, которым может управлять и искусственный интеллект. Чтобы робот мог выполнить работу, у светильника должен быть универсальный разъем. Крепление позволит быстро его снимать и устанавливать, и замена светильника станет однотипной операцией. Робот будет выполнять ее в автоматическом режиме.
В современных условиях, когда интеллектуальные устройства «выходят» из промышленных цехов на улицу, им важно уметь самостоятельно собирать и обрабатывать информацию, рассказывают разработчики. Расположение объектов в реальном мире может меняться, поэтому роботы должны не только работать по инструкции, но и уметь действовать в нештатных ситуациях.
– Промышленные роботы на производстве ориентируются в пространстве с помощью заранее определенных карт или радиометок. Но в открытом пространстве, на улице, эти технологии становятся дорогостоящими. Невозможно оборудовать метками все объекты и поддерживать карты внешней среды в актуальном состоянии. Поэтому мы предлагаем использовать нейронные сети и методы машинного обучения, чтобы робот распознавал сложные объекты в режиме реального времени. По фото или видео он классифицирует светильники и на основе этого принимает решения, – поясняет разработчик.
Ученые обучили искусственный интеллект на отдельном сервере. Обучение нейронной сети пермские разработчики провели с помощью 250 фотографий фонарей в «знакомых» для робота ракурсах. Подборку в дальнейшем можно пополнять новыми фото, которые собирает робокомплекс. Устройство работает эффективно даже на вычислительных ресурсах с небольшой мощностью.
Напомним, что с 2020 года в Пермском Политехе стартует первая в России онлайн-магистратура по робототехнике. Научиться работе с сервисными роботами студенты смогут из любой точки земного шара.
Комментарии
(0) Добавить комментарий