
Проверка состояния дамб и других защитных морских сооружений в Голландии, как правило, это задача для группы автономных роботов. Но, если в течение шести часов в день при проведении испытаний они перемещаются по дамбам и передают результаты, то расходуют слишком много электроэнергии.
Установка зарядных станций в этом случае является не очень реалистичным сценарием. Аспирант голландского Университета Твенте Douwe Dresscher выполнил исследование с целью создания максимально автономных роботов. Он использует механизм накопления механической энергии за счет инновационной автоматической трансмиссии. Это современная версия трансмиссии «Вариоматик», использованной в голландских автомобилях DAF. Только вместо ременного привода, здесь использованы две металлические полусферы.
Ходить или ездить?
Для начала Dresscher пришлось выбрать оптимальный способ перемещения по дамбе: с помощью колес, гусениц или ног. Отличающиеся энергоэффективностью колеса хороши на ровной поверхности, но мокрый и грязный склон это нечто совсем иное. В этом случае лучше подойдут более мощные гусеницы, но они могут повредить дамбу и весьма неэффективны по энергетическим параметрам. Удивительно, но имеющий от четырех до шести ног шагающий робот является лучшим вариантом. Шагающие роботы отличаются сбалансированностью подаваемой и потребляемой энергии. Тем не менее, они по-прежнему потребляют много энергии. Производимые шагающие роботы всегда используют аккумуляторы большой емкости.
Механическое хранение
Электромоторы являются основными потребителями энергии. Они лучше всего работают на высоких скоростях с низким крутящим моментом, но для ходьбы часто требуются низкие обороты и высокий крутящий момент. Если сохранять энергию не в электрической, а в механической форме, электромоторы смогут выполнять свою работу в оптимальном режиме, а механическая энергия может быть использована повторно. Этот принцип Dresscher называет «управляемым пассивным возбуждением».
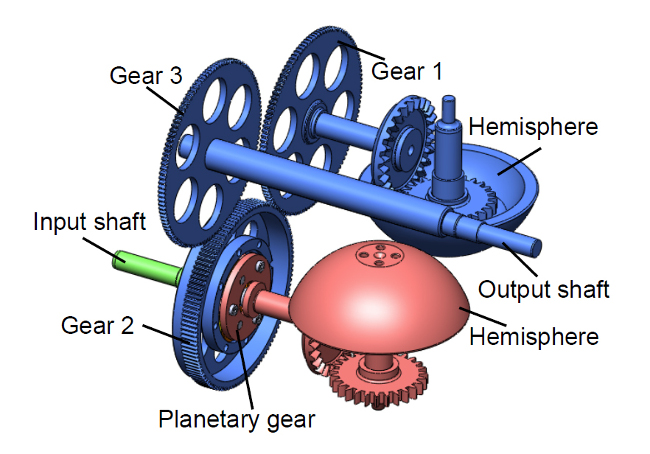
Система сохраняет механическую энергию, например, в пружине. Специальный механизм коробки передач обеспечивает оптимальную трансмиссию. Две половины вращающихся полусфер постоянно находятся в контакте. Разница в эффективных радиусах определяет коэффициент передачи и оптимальную механическую нагрузку. Электромоторы включаются в работу только для компенсации механических потерь. Действуя таким образом, они могут работать с высокой скоростью вращения в режиме с низким крутящим моментом.
Полностью автономная система
Для того, чтобы роботы-инспекторы дамб были полностью энергонезависимыми, им придется собирать энергию в движении. В качестве вариантов могут рассматриваться солнечная и ветровая энергия, а также биомасса. Dresscher не рассматривал в деталях эти аспекты конструкции. Его работа была полностью сфокусирована на системе передвижения и механизме трансмиссии робота. Для реального применения в роботах необходимо уменьшить конструкцию, а механические потери могут быть еще более снижены.
Механическая трансмиссия разрабатывалась специально для инспектирующих дамбы перспективных роботов, но может быть востребована также и для повышения энергетической эффективности существующих роботов и роботизированных манипуляторов.
Комментарии
(0) Добавить комментарий