
Многие роботы похожи на черепах, но от них мало пользы, когда они лежат на спине. Поэтому ученые из Исследовательской лаборатории армии США (ARL) и Лаборатории прикладной физики Университета Джона Хопкинса (JHU/APL) работают над программным обеспечением, которое помогает упавшим военным роботам самостоятельно подниматься.
Целью является желание сделать роботов не только более эффективными, но также и менее зависимыми от поддержки находящихся рядом солдат.
Военные роботы всегда должны находиться в боевом положении. Большинство из них являются удаленными разведывательными сборщиками или действуют в качестве дополнительных глаз для солдат на передовой линии, которые позволяют им оценивать места с любыми признаками опасности, прежде чем рисковать жизнью.
Согласно заявлению исследователя ARL д-ра Чада Кессенса, связь между солдатом и роботом может быть теснее, чем у собаки с ее хозяином. И, вероятно, это может заставить человека рискнуть собой ради того, чтобы спасти своего механического партнера.
Проблема в том, что при всей их изощренности, современные военные роботы по-прежнему похожи на большинство других машин. Если они падают, у них возникают серьезные трудности с возвращением в строй. Чтобы найти решение этой проблемы, Кессенс разрабатывает программное обеспечение, способное помочь роботам проанализировать ситуацию, в которой они находятся, и найти правильные решения, чтобы подняться на ноги.
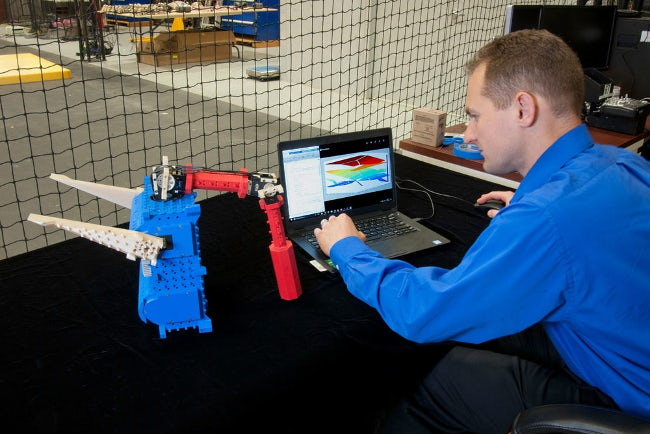
Для воплощения этой идеи в жизнь исследователи из Экспедиционной миссии ВМС США PMS-408 и ее технический отдел применяют новое ПО к своей усовершенствованной роботизированной системе взрывоопасных боеприпасов (AEODRS).
Поскольку самозащита является важной задачей для робота по обезвреживанию бомб, команда JHU/APL работала с ARL, чтобы включить программное обеспечение в AEODRS и расширить его использование для роботов с большим количеством шарнирных соединений, используя адаптивную систему выборки, разработанную Галеном Маллинсом, исследователем из JHU/APL.
Робота научили использовать недавно разработанный Инструмент интеллектуального планирования диапазона (RAPT) – программную среду, применяемую для тестирования автономных и роботизированных систем, которые были первоначально разработаны для подводных аппаратов, но применяются также и в самозакрывающихся роботах.
AEODRS может использовать восемь степеней свободы, чтобы понять, как правильно себя вести, оценивая свое первоначальное состояние и определяя, как двигаться, чтобы встать на ноги. В будущем разработчики надеются выйти за рамки одного робота и предложить более универсальное программного обеспечения.
Комментарии
(0) Добавить комментарий