
Для диагностики нефтяных и газовых трубопроводов применяют автономных роботов, которые проникают внутрь и получают достоверные данные о состоянии трубы, тем самым предотвращая большое количество аварий, повреждений и значительные экономические потери. Однако существующие устройства не могут контролировать все части трубопровода, например, отводы, вертикальные и наклонные участки им недоступны.
Ученые ПНИПУ разработали механическую конструкцию робота, которая имеет несколько приводных колесных движителей. Устройство работает при разных углах наклона поверхности, обладает высоким запасом мощности и низким энергопотреблением.
Статья с результатами опубликована в журнале «Строительные и дорожные машины», №6, 2023 год, по направлению «2.5.4 Мехатроника, робототехника и робототехнические комплексы». Исследование выполнено при поддержке Фонда содействия инновациям и в рамках программы стратегического академического лидерства «Приоритет 2030».
Роботизированные системы для диагностики технологических трубопроводов – это устройства небольшого размера, которые передвигаются внутри трубы и с помощью камеры и чувствительных датчиков точно фиксируют все нарушения, а затем передают информацию на компьютер специалисту. Благодаря своей мобильности они способны осуществлять осмотр и мониторинг в труднодоступных местах. Это позволяет предотвращать различные повреждения, износ, коррозию и утечки при транспортировке нефти и газа.
Для улучшения проходимости робота по сложным частям трубопровода (крутым подъемам и поворотам) ученые ПНИПУ разработали привод колесного движителя, который является источником движения по внутритрубному пространству. Он отвечает за скорость и проходимость робота в трудных условиях, именно от него зависит полноценное и качественное передвижение устройства.
Всю функциональную структуру привода формируют двигательная и редукторная подсистемы. Первая состоит из электромотора, который преобразует электрическую энергию от источника питания в механическую. Редукторная передает ее колесным движителям, и они образовывают из этой энергии тяговые усилия, за счет которых приходит в движение весь робототехнический комплекс.
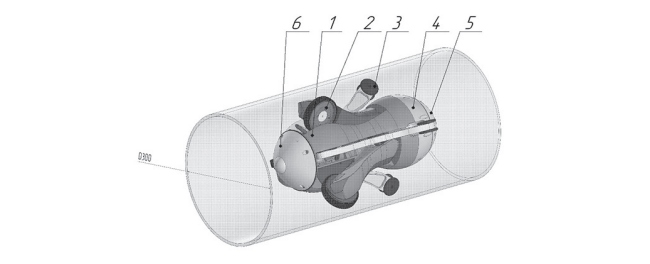
Ученые ПНИПУ разработали привод автономного робота, включающий в себя коническую пару редукторной подсистемы с колесным движителем и коллекторный электромотор, который отличается простым управлением и низким энергопотреблением (до 1 ампер-час). Это позволяет устройству работать более 10 часов. Механическая конструкция робота содержит корпус, на котором установлены шесть опорных ног с колесным движителем. Выбран именно колесный тип, так как он испытывает наименьшее сопротивление движению, в отличие от других, например, гусеничных. Политехники изучили тягово-динамические характеристики привода.
– По проведенным испытаниям мы выяснили, с какой силой необходимо поджимать колесный движитель к внутритрубной поверхности для получения необходимого тягового усилия на колесе. Если движитель будет плохо прижат к поверхности, он будет скользить. Результаты также показали нам, что разработанный привод обладает высокими динамическими показателями, это значит, устройство способно развивать высокую скорость (до 5 метров в минуту) в различных условиях и преодолевать поверхности на максимальном угле наклона в 90°, – рассказывает ведущий инженер-программист проекта Белобородов Филипп.
– Температура корпуса электромотора – это важный параметр привода. Перемещение робототехнического корпуса на большие расстояния может привести к перегреву электромотора и неполадкам. В разработанном устройстве корпус приводного механизма имеет температуру размягчения 130 ℃, эту границу превышать нельзя. С помощью специального датчика мы выяснили, что максимальная температура нагрева корпуса электродвигателя составляет 56 ℃ и при дальнейшей работе остается постоянной, – рассказывает ассистент кафедры «Оборудование и автоматизация химических производств» ПНИПУ Дмитрий Кучев.
В настоящий момент устройство активно используется на одном из предприятий и в скором времени будет готово к запуску в массовое производство.
Разработанный привод ученых ПНИПУ обеспечивает качественную и долговечную работу робототехнического комплекса для мониторинга внутритрубного пространства. Даже при наличии высоких нагрузок на приводной элемент, устройство потребляет достаточно низкое количество энергии, что благоприятно складывается на его работе в целом. Разработка позволит эффективно проводить диагностику трубопроводов, тем самым предотвращая множество повреждений и аварий при транспортировке нефти и газа.
Фото: Unsplash/Roger Starnes Sr
Комментарии
(0) Добавить комментарий