")
Созданный в Корнельском университете робот может самостоятельно разобраться в устройстве машины для приготовления кофе, которую он никогда до этого не видел. Если роботы становятся частью нашей жизни, они должны научиться делать обыденные вещи. По инструкции к новой технике нужно разобраться, как ею пользоваться. Такую задачу поставили перед роботом сотрудники Корнельского университета, которые создали робота, который может не просто сварить кофе, но и научиться использовать незнакомый прежде кофе-автомат.
Разработка новых роботов не сводится к задачам машиностроения. Проблема заключается в том, чтобы научить их решать возникающие задачи. Для научных и заводских роботов это может быть сделано путем непосредственного их программирования или направления их действий с помощью клавиатуры или джойстика.
Однако, если роботы будут работать в привычных для нас условиях, например, дома, в офисе, магазине или ресторане, они должны быть способны к самообучению.Под руководством Ашутоша Саксена, доцента кафедры информатики, сотрудники Корнельского университета приступил к разработке робота, который может использовать свой опыт и опыт других роботов, наряду с текстовыми инструкциями, чтобы научиться пользоваться незнакомой машиной. Если робот работал с тремя другими кофе-машинами, рассуждает Саксен, то он должен быть в состоянии научиться использовать и четвертую.
Часть ответа на проблему заключается в онлайн-базе данных для механических движений, производимых другими роботами и в онлайн-базе проекта, где все желающие дают уроки роботу по движениям. Идея заключается в том, что, когда человек узнает, как использовать новую машину, он не изучает по-новому, как нажимать на кнопки, использовать ручки или рычаг каждый раз, когда опять сталкивается с подобной задачей. Мы можем решать новые задачи, используя прошлый опыт.
Так же поступает и робот Бариста. Он использует движения, производимые им при работе с другой кофе-машиной или с любым из других 116 устройств, с которыми он прежде работал. Эти движения могут быть адаптированы и для новой машины.
По словам разработчиков, это уже большой прогресс, но его не достаточно, чтобы сделать работу. Любой, кто пытался изучить новую машину, может сказать, что инструкции часто оказывают большую помощь. Таким образом, робот был запрограммирован с помощью алгоритма углубленного обучения, который позволяет ему применять свой опыт и объединять его с письменными инструкциями, которые он может загрузить и разобраться в информации о том, как работает новый кофе-автомат, разбив задачу на более мелкие шаги.
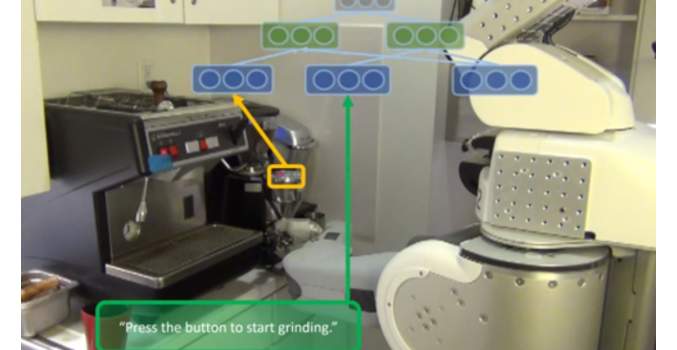
Одна из причин, почему углубленное изучение является такой важной частью «корнельского решения» в том, что естественный язык страдает от "шума". Робот должен знать лингвистическую разницу между ручкой и выключателем или ручкой и рычагом, затем сопоставить их с соответствующими движениями при работе. Это включает послойный анализ информации от общего к частному в плане инструкций и движений.
Кроме того, робот должен иметь возможность идентифицировать объекты по форме, а не по месту, так они могут быть расположены в разных местах у разных машин. Он делает это, используя 3D камеру и лазерный дальномер, которые обеспечивают "облако точек" - координаты, которые позволяют ему идентифицировать объекты и планировать траекторию движения для управления машиной.
Разработчики утверждают, что робот добился лишь 60 % точности на новых машинах, потому что его система машинного зрения имеет проблемы с отражениями от блестящих поверхностей кухонной утвари.
По словам разработчиков, следующим шагом в усовершенствовании робота будет использование осязание для тактильной обратной связи и визуального контроля, чтобы он не натыкался на окружающие предметы. Кроме того, робота необходимо запрограммировать так, чтобы он использовал метод проб и ошибок, как часть процесса обучения, подобно обучающемуся человеку.
Результаты работы будут представлены в виде доклада и демонстрации на конференции «Роботизированные науки и системы - 2015», в Риме 16 июля.
Комментарии
(0) Добавить комментарий