
Исследовательская группа из Лидского университета разработала роботизированную полуавтоматическую систему для проведения колоноскопии. По словам исследователей она облегчит работу врачей и сделает процедуру менее болезненной для пациентов.
По данным BMJ, рак толстой кишки занимает третье место в мире по распространенности среди злокачественных опухолей. Колоноскопия - это процедура для исследования прямой кишки и толстой кишки, которая обычно является настолько болезненной, что пациентам требуется анестетик.
Исследовательская группа разработала устройство в форме небольшой капсулы, которое крепится к узкому кабелю и после введения в толстую кишку управляется магнитом, установленным на роботизированной руке, расположенной над пациентом. Отмечается, что хотя управлять роботизированным манипулятором можно и вручную, эту технику сложно освоить, поэтому исследователи разработали несколько уровней роботизированной помощи и провели исследование по оценке их эффективности при проведении процедуры неспециалистами.
Кликните для увеличения
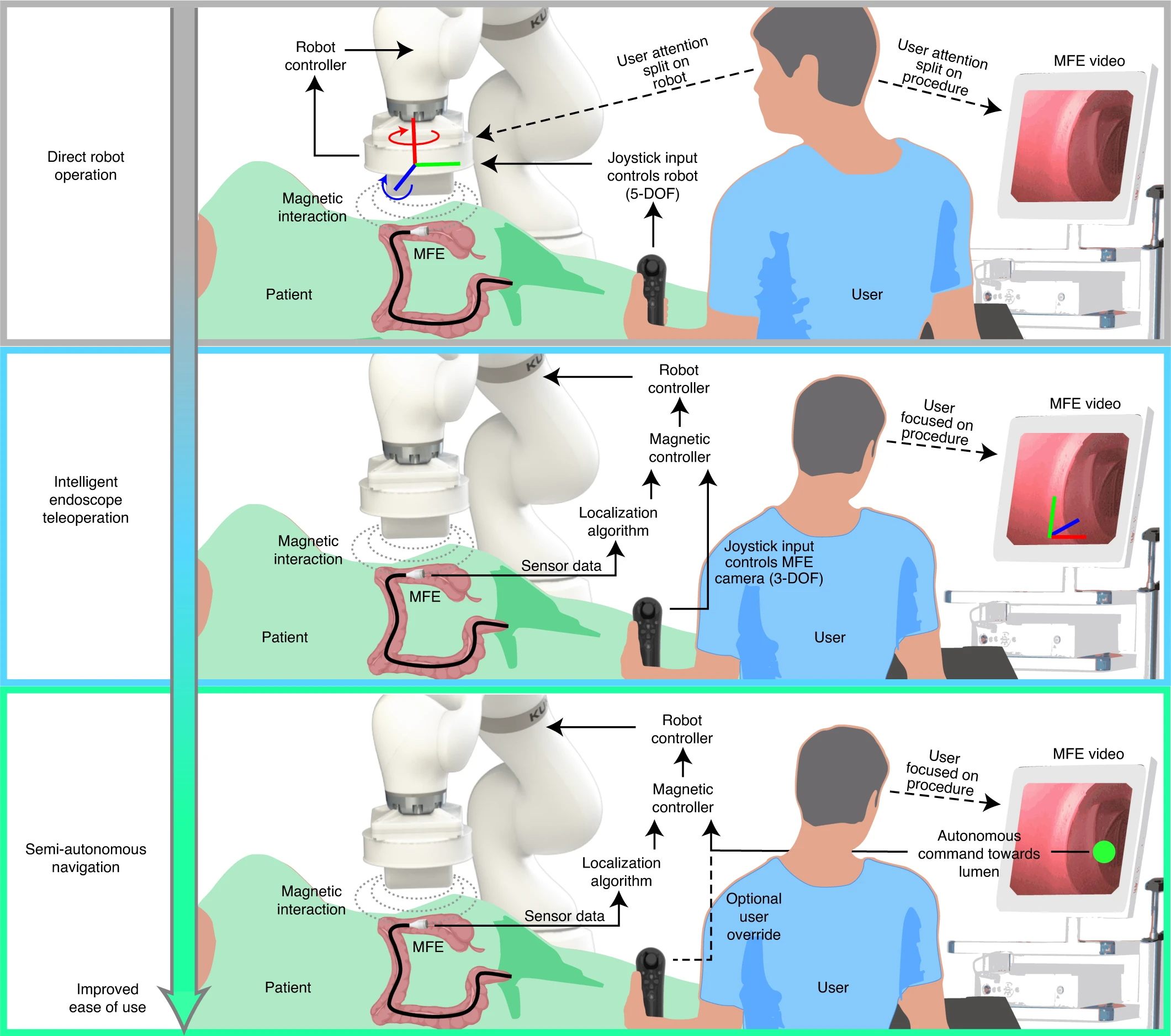
Оценивались три варианта управления роботом:
- прямое управление, когда оператор сам управляет роботом с помощью джойстика;
- интеллектуальная телеуправление, когда оператор фокусируется только на месте, где должна находиться капсула, а роботизированная система сама рассчитывает движения манипулятора для ее доставки в нужную точку;
- полуавтономная навигация, когда роботизированная система автономно перемещает капсулу через толстую кишку, используя компьютерное зрение, хотя оператор может при этом вмешаться.
Во время лабораторного моделирования десяти сотрудникам, не являющихся экспертами, была поставлена задача доставить капсулу в определенную точку в толстой кишке в течение 20 минут, которую они должны были выполнить 5 раз с помощью каждого варианта управления манипулятором. С помощью прямого управления роботом, участники добились успеха в 58% случаев. Во втором случае при использовании интеллектуального телеуправления эффективность увеличилась до 96%, и достигла 100% при использовании полуавтономной навигации.
Испытания системы на пациентах могут начаться в следующем году или в начале 2022 года.
Комментарии
(0) Добавить комментарий