
Рак легких является основной причиной смертности от онкологических заболеваний в США. Некоторые опухоли очень малы и скрываются глубоко в легочной ткани, что затрудняет доступ к ним хирургов. Для решения этой проблемы ученые из University of North Carolina (UNC) в Чапел-Хилле и Vanderbilt University работали над созданием гибкого, но прочного робота, способного преодолевать легочную ткань.
В работе "Autonomous medical needle steering invivo", опубликованной в журнале Science Robotics, профессор Рон Альтеровиц и доцент Джейсон Акулян доказали, что их робот может автономно перемещаться из точки А в точку Б, избегая при этом важных структур, таких как крошечные дыхательные пути и кровеносные сосуды, на живой лабораторной модели.
"Эта технология позволяет нам достигать целей, до которых невозможно добраться с помощью стандартного или даже роботизированного бронхоскопа, - говорит Акулян. - Это дает дополнительные несколько миллиметров или даже сантиметров, что очень помогает при поиске небольших целей в легких".
Робот состоит из нескольких отдельных компонентов. Механическое управление обеспечивает контролируемую тягу иглы вперед и назад, а конструкция иглы позволяет двигаться по изогнутым траекториям. Игла изготовлена из никель-титанового сплава и подвергнута лазерному травлению для повышения ее гибкости, что позволяет ей легко проходить через ткани. При движении вперед травление на игле позволяет ей легко обходить препятствия. Другие насадки, например катетеры, могут использоваться вместе с иглой для проведения таких процедур, как биопсия легких.
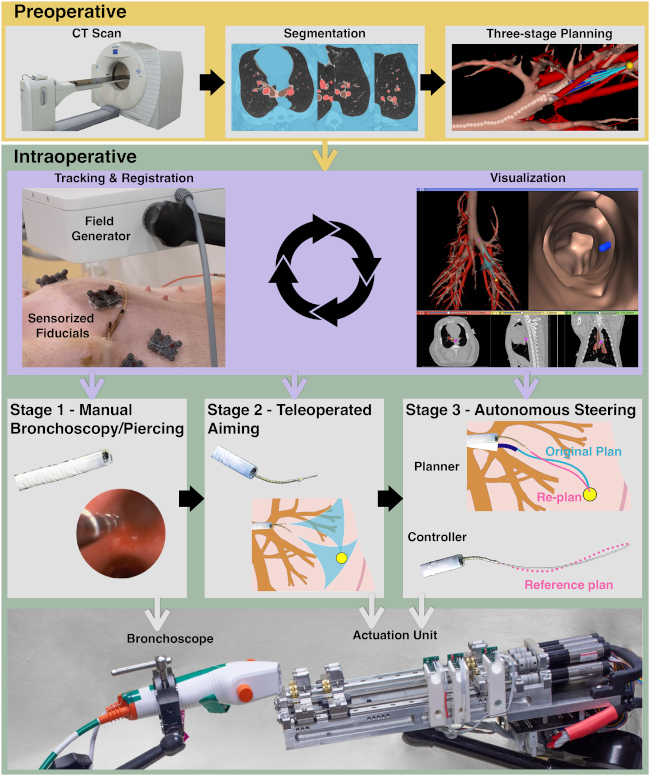
Исследовательская группа использовала компьютерную томографию грудной полости и ИИ для создания трехмерной модели легкого, включая дыхательные пути, кровеносные сосуды и выбранную цель. Используя эту трехмерную модель и позиционируя иглу для запуска, ПО с ИИ автоматически направляет ее из точки А в точку Б.
"Разработанная нами автономная управляемая игла очень компактна, но при этом она оснащена целым набором технологий, позволяющих ей осуществлять автономную навигацию в режиме реального времени, - сказал Альтеровиц. - Это похоже на автономный автомобиль, только он перемещается по легочной ткани, избегая препятствий, таких как крупные кровеносные сосуды, по пути к месту назначения".
Игла может также учитывать дыхательные движения. В отличие от других органов, легкие постоянно расширяются и сжимаются в грудной полости. Это может затруднить нацеливание. По словам Акуляна, это все равно что стрелять по движущейся мишени.
Исследователи испытывали своего робота, когда лабораторная модель выполняла прерывистую задержку дыхания. При каждой задержке дыхания робот программируется на движение вперед.
"Мы планируем продолжить создание новых автономных медицинских роботов, которые объединят сильные стороны робототехники и ИИ, чтобы улучшить результаты лечения пациентов с различными проблемами здоровья, обеспечивая при этом гарантии безопасности пациентов", - говорит Альтеровиц.
Комментарии
(0) Добавить комментарий