")
Научная фантастика быстро становится реальностью. Ученые из Южной Корее удивительно быстро совершенствуют микророботов с дистанционным управлением, предназначенных для перемещения по кровеносным артериям и доставки препаратов непосредственно к нуждающимся в них органам.
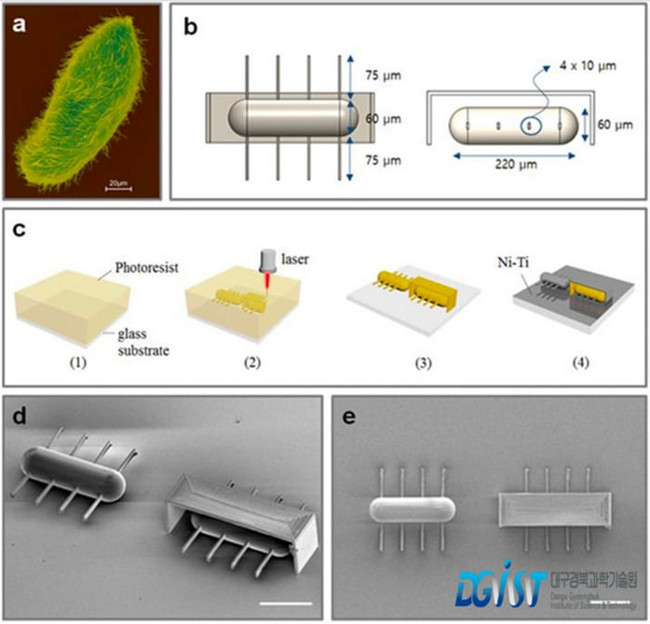
Разрабатываемый на кафедре робототехники Института науки и технологии (DGIST), новый микроробот отличается высокой маневренностью и перемещается в восемь раз быстрее, чем его последний предшественник. При этом он использует двигательную систему по образу широко изученных реснитчатых микроорганизмов, известных как инфузория-туфелька.
Многие научные учреждения сегодня стремятся разработать способы доставки медикаментов напрямую к необходимой части тела (забитые артерии или опухоль). Это необходимо потому, что вводимые обычно лекарственные препараты должны пройти через весь организм, что имеет риск передозировки и часто вызывает побочные эффекты, такие как тошнота и ослабление иммунной системы.
Одной из основных задач при создании микроробота, который может проникать непосредственно в пораженный орган, является выбор метода плавания для продвижения в жидкой микроскопической среде.
Такие микроорганизмы, как бактерии и одноклеточные продвигают себя иным способом, чем используемый более крупными животными. Связано это с тем, что микроорганизмы не могут эффективно двигаться в жидкой макросреде, используя обычные типы движения. Это особенно относится к крови и другим плотным жидкостям, в которых неэффективными оказываются даже двигательные установки надводных судов и подводных лодок.
Именно поэтому ученые и инженеры искали ответы в природе и экспериментировали с микророботами, которые перемещаются иными способами. До сих пор, однако, не удавалось реализовать двигательную систему с большим количеством движущихся, похожих на волосы ресничек, которые используют туфельки.
Исследовательской группе из Южной Кореи удалось добиться этого впервые в мире с помощью лазерной 3D литографии для создания мерцательной полимерной структуры для микроробота. Затем на реснички осаждают слой никеля и титана, чтобы обеспечить магнитное приведение в действие и обеспечить совместимость с биологической системой.
Исследователям удалось с впечатляющими результатами перемещать реснички взад и вперед, используя электромагнитную катушку.
Робот длиной 220 микрометров может под влиянием электромагнитной индукции двигаться со скоростью 340 микрометров в секунду. В сравнении с предыдущими микроботами значительно увеличились дальность и маневренность.
Возможность смещения направления перемещения в диапазоне от нуля до 120 градусов, позволит ему уверенно перемещаться в кровеносных артериях.
Комментарии
(0) Добавить комментарий