
В ходе операций на труднодоступных органах хирургам часто приходится делать несколько надрезов, чтобы получить доступ под разными углами. Иногда для того, чтобы отодвинуть ткани, которые закрывают доступ, также используются специальные инструменты, например, ретракторы. Тем не менее, команда исследователей из Высшей школы Святой Анны в Италии работает над альтернативным методом — гибким манипулятором, созданным наподобие щупальца осьминога.
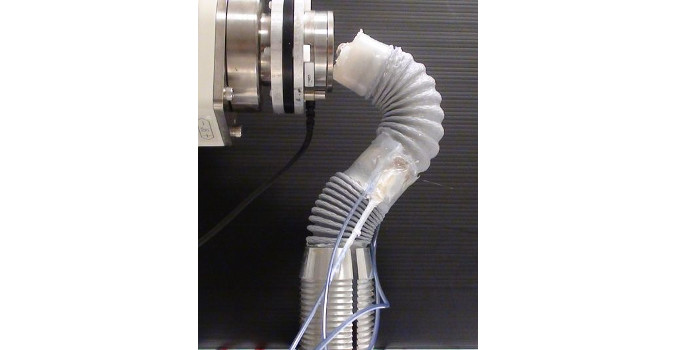
Этот манипулятор сможет обходить другие органы и удерживать их, в то же время проводя операцию в необходимой зоне. Прототип устройства состоит из двух соединенных модулей, в каждом из которых есть три цилиндрические камеры с воздухом. Выборочно сдувая и надувая отдельные камеры, можно сгибать манипулятор и растягивать его в разных направлениях – на любом участке по всей длине.
Однако манипулятор не может быть чересчур гибким, поскольку он также должен удерживать другие органы, расположенные на пути. По крайней мере, устройство должно обладать регулируемой степенью гибкости. Именно поэтому в гибкой внутренней мембране манипулятора содержатся специальные гранулы (на данном этапе ученые решили использовать молотый кофе) – этот материал может легко перемещаться внутри мембраны, а устройство целиком сохраняет пластичность.
При необходимости из мембраны вытягивается воздух, и внутри нее создается вакуум, после чего плотность материала увеличивается, поскольку частицы кофе вплотную прижимаются друг к другу. Это явление получило соответствующее название, «гранулярное сжатие» – в результате мембрана и устройство целиком становятся жесткими, до тех пор, пока снова не будет впущен воздух.
Идея ученых заключается в том, что изначально манипулятор будет гибким, за счет чего он сможет добраться до нужной зоны без использования ретракторов или других инструментов. После этого устройство должно раздвинуть окружающие ткани и принять жесткую форму, чтобы удержаться в необходимом положении. На конце манипулятора будут расположены хирургические инструменты, которыми врачи смогут управлять дистанционно для проведения необходимых процедур.
В ходе испытаний прототипа устройство продемонстрировало способность сгибаться под углом до 255 градусов, растягиваться на 62% в расслабленном состоянии и становиться на 200% более жестким. Кроме того, манипулятор сумел раздвинуть шары, наполненные водой (имитирующие внутренние органы), не повредив их.
«В ходе традиционных операций часто для одной процедуры требуется использовать целый ряд специальных инструментов, таких как зажимы, ретракторы, секционные инструменты и системы видеокамер, – говорит ведущий исследователь, доктор Томмасо Ранзани. – Мы считаем, что наше устройство – это первый шаг к созданию инструмента, который сможет осуществлять все эти действия, а также достигать труднодоступных участков организма, не повреждая другие органы и ткани на своем пути».
Комментарии
(0) Добавить комментарий