")
В глубинах океана есть места, недоступные даже для профессиональных аквалангистов в силу физиологических ограничений человеческого организма. Но теперь и эти глубоководные зоны становятся доступными для человека с помощью гуманоидного робота из Стэнфордского университета, обладающего искусственным интеллектом, использующего технологию тактильной обратной связи.
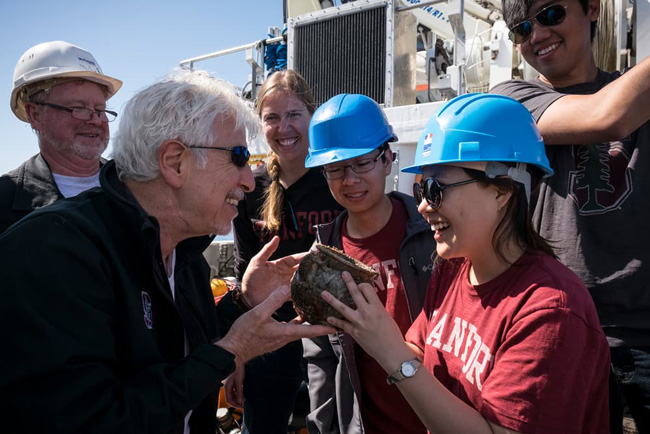
Имеющиеся до сих пор возможности глубоководного погружения уже позволяют использовать подводных роботов для исследований. Мы уже видели глубоководных роботов в виде медузы, угря, осьминога. Но, но по мнению исследователей из Стэнфорда, человекоподобная форма также может обеспечить роботу под водой ряд преимуществ. В своей дебютной экспедиции, робот OceanOne обследовал затонувшее судно у берегов Франции и вернулся с изящной вазой 17 века.
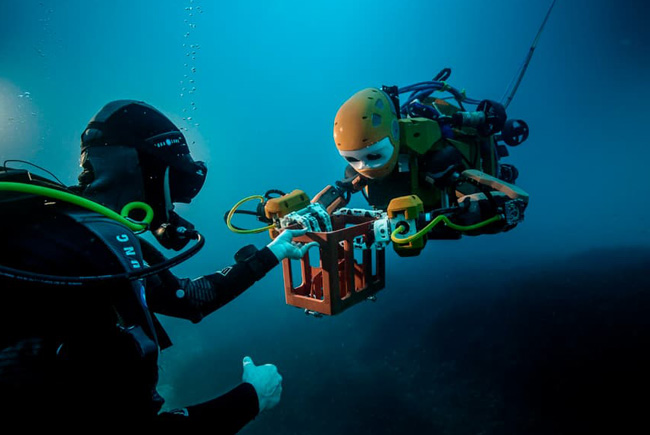
Робот OceanOne изначально был задуман для изучения глубоководных коралловых рифов в Красном море, как инструмент с повышенной тактильной чувствительностью, сравнимой с человеческой. Робот высотой около 1,5 м оснащен стереоскопическим зрением и парой полностью поворотных манипуляторов, имеет встроенные в хвост восемь разнонаправленных, подруливающих двигателей, батареи питания и систему управления. Описываемый как робот-русалка, OceanOne дистанционно управляется с помощью джойстиков, с судна на поверхности воды.
Первым местом работы робота стал затонувший в 1664 году возле южного побережья Франции королевский фрегат La Lune, времен Людовика XIV. Ни один человек не мог прежде добраться до затонувшего судна. Но благодаря проведенным ранее исследованиям, OceanOne смог успешно перемещаться на месте кораблекрушения.
Глазами робота оператор увидел вазу размером с грейпфрут и протянул к ней шарнирный манипулятор OceanOne, чтобы ощутить контуры и вес вазы. Подобную возможность обеспечивают датчики усилия, которые имеют тактильную обратную связь с органами управления. Разработчики утверждают, что обратная связь настолько чувствительна, что оператор может отметить, что робот схватил что-то твердое и тяжелое или легкое и нежное. Такая тактильная связь в сочетании с искусственным интеллектом гарантирует надежное и не вызывающее повреждений удержание роботом объекта. Ваза была благополучно поднята наверх, где попала в человеческие руки, проведя под водой более чем через 300 лет.
Почти в такой же степени впечатляет возможность позиционирования робота в воде. Используя датчики, OceanOne измеряет силу течений и турбулентности в воде и автоматически запускает двигатели, чтобы противостоять этим силам и оставаться на месте. Даже при смещении корпуса робота, за счет автоматической коррекции манипуляторов они остаются в прежнем положении.
Робот прокладывает свой маршрут, изучая окружающую среду с помощью датчиков и камер. Алгоритмы обработки данных обеспечивают обход препятствий. А если он «чувствует» впереди препятствие, но рассчитывает, что оно не сможет замедлить его перемещение, OceanOne будет использовать свои руки, чтобы приготовиться к столкновению, подобно тому, как это делает человек.
Но его навигационные способности еще не достаточно совершенны. По мере того, как робот добрался до места кораблекрушения, он оказался зажатым между двумя пушками. Используя двигатели малой тяги невозможно было освободить его. Тогда оператор взял на себя управление и имитировал толчок руками робота вверх, что, в конце концов, позволило освободить его.
Исследователи из Стэнфорда утверждают, что человеческая форма позволяет OceanOne еще и общаться с водолазами, используя жесты рук.
OceanOne возвратится в Стэнфорд в следующем месяце, где будет подвергнут усовершенствованиям. Основной целью является создание робота, который может взять на себя задачи, которые слишком опасны или физически невозможны для выполнения людьми. Робот сможет найти применение при изучении глубоководных коралловых рифов, в работах по обслуживанию подводной части плавучих нефтяных платформ и при устранении последствий аварий под водой.
Комментарии
(0) Добавить комментарий