
В 2014 году в докладе об исследовании глубоководных коралловых рифов Дэвид Грубер, морской биолог из нью-йоркского колледжа имени Баруха, показал видео, на котором неуклюжая робо-рука собирает хрупкие образцы кораллов и морских губок. В аудитории тогда находился специалист-робототехник из Гарварда Роберт Джей Вуд. Национальное географическое общество считает этих исследователей подающими особые надежды специалистами. И они оправдали ожидания.
«Они использовали жесткие гиидравлические захваты, разработанные для нефтяной и газовой промышленности, которые совершенно пережимали и разрушали находки», - вспоминает Вуд. «Сразу же появилась мысль, что здесь подойдет мягкое роботизированное устройство».
В последующие месяцы шла совместная работа, чтобы спроектировать, изготовить и протестировать мягкие роботизированные захваты для сбора глубоководных хрупких биологических образцов. Первое использование этой мягкой робототехники для неразрушающего отбора образцов донной флоры произошло во время недавней экспедиции в Эйлатском заливе на севере Красного моря, уникальная морская экосистема которого включает один из самых больших в мире и самых разнообразных коралловых рифов.
Эта новая технология расширит возможности исследователей по сбору образцов из малоисследованных глубоководных мест обитания, в районах, которые ученые считают «горячими точками» биоразнообразия, где бурлят неизвестные формы жизни. Мягкие захваты также могут быть полезны в подводной археологии.
Грубер является доцентом кафедры биологии и экологии в колледже им. Баруха Университета Нью-Йорка и научным сотрудником американского музея естественной истории. Исследуя глубоководные океанические экосистемы, он уделяет особое внимание организмам, которые демонстрируют биолюминесцентные и биофлюоресцентные свойства. (Биолюминесцентные организмы сами воспроизводят свет, биофлюоресцентные организмы поглощают свет и переизлучают его в другом цвете.)
Когда Грубер хочет осмотреть коралловый риф, расположенный ниже доступной для человека глубины, он должен полагаться на дистанционно управляемый подводный аппарат. Но здесь есть одна проблема. Серийно выпускаемые роботизированные манипуляторы для подводных телеуправляемых аппаратов не приспособлены для сбора нежных кораллов, морских губок и других образцов.
Для перемещения и сбора хрупких организмов с морского дна требует что-то такое, что может имитировать ловкость и мягкое прикосновение рук человека. Вуд, Чарльз Ривер, профессор инженерных и прикладных наук в Гарварде, Джон А. Полсон из Школы инженерных и прикладных наук признают, что мягкая робототехника идеально подходит для решения таких задач.
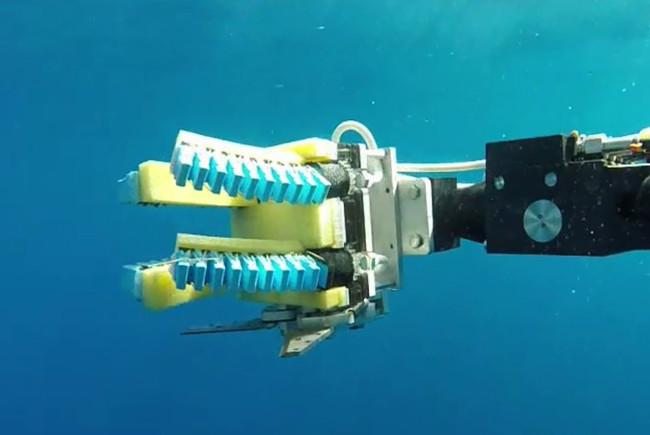
Вуд и Кевин Галлоуэй, инженер-механик из Института Висса, приступили к разработке двух типов манипуляторов, способных заменить серийно выпускаемые металлические захваты и позволяющие нежно обхватить объекты различных размеров и форм. Принцип действия одного из манипуляторов был позаимствован у сворачиваемого кольцами конструктора в виде удава. Он может действовать в ограниченном пространстве, зацепляя мелкие объекты неправильной формы. Другой манипулятор использует возможности расположенных друг против друга гибких приводов.
Для обеспечения быстрой модификации и ремонта в полевых условиях, разработчики уделили особое внимание простоте механизма, использованию недорогих материалов и модульному принципу конструкции. Это означало, что они опробовали разные конфигурации, чтобы получить необходимые параметры. Гарвардский офис развития технологий подал патентную заявку на созданный способ изготовления мягких приводов мембранного типа. Метод является масштабируемым, данный тип привода имеет широкий спектр коммерческих, промышленных и биомедицинских применений.

Основной трудностью при проектировании, по утверждению Вуда, было отсутствие точной спецификации. Они занимались не проектированием роботизированной руки, способной лишь многократно делать одно и то же на сборочном конвейере автозавода. У разработчиков не было возможности узнать размер, форму или жесткость предметов, которые они будут собирать на дне океана. Для воссоздания максимально приближенных условий деятельности они посетили овощной рынок и возвратились со множеством овощей – сельдерей, редис, морковь и китайская капуста. Привязали все это к металлической решетке и опустили в испытательный бассейн в университете Род-Айленда. После всесторонних испытаний в бассейне, устройства были проверены на глубинах более 800 метров вблизи побережья Род-Айленда.
Натурными испытаниями занялась команда из Израиля в Эйлатском заливе, в северной части Красного моря, в мае 2015 года. Там они провели более десятка погружений в диапазоне от 100 до 170 метров. В большинстве погружений для тестирования производительности системы исследовалась процедура "поймал-отпустил". Но используя захваты они также извлекли образцы нежных (и относительно распространенных) красных, мягких кораллов, а также трудно извлекаемые кораллы, выводя их на поверхность не поврежденными в грузовом лотке подводного аппарата.
В этом году испытания и исследования будут продолжаться, также будет модифицироваться и сам подводный робомеханизм – если во время погружений на Красном море система работала на глубинах до 200 метров, то теперь команда планирует проведение полевых работ в неизведанных глубинах около 6000 метров.
Комментарии
(0) Добавить комментарий