")
В поисках наиболее удачной конструкции роботизированного жука модными становятся мультимодальные системы передвижения, созданные по мотивам живой природы. Сочетание таких навыков, как бег с прыжками, позволяет создавать маленьких роботов с наиболее эффективной системой передвижения, что позволяет им дальше перемещаться на одной зарядке, помогает преодолевать препятствия и двигаться по пересеченной местности.
Большинство из ранее представленных маленьких прыгающих роботов используют пружинный механизм с защелкой. Защелка обеспечивает для пружины два состояния: пружина полностью закручивается, а защелка удерживает ее, а затем по команде защелка открывается, молниеносно высвободив всю энергию в прыжке. Таким образом, можно обеспечить довольно большую мощность, но, к сожалению, при действии по принципу все или ничего, ее величину и такие параметры, как высота и расстояние, невозможно контролировать.
Однако недавно в Национальном университете Сеула разработали новый тип прыгающего механизма для роботов, которые потенциально могут менять длину прыжка от маленького отскока до полноценного катапультирования. В сотрудничестве с университетом из Беркли они ухитрились запихнуть весь этот механизм в знакомый многим под названием DASH шестиногий бегающий робот. В результате получили бегающего и прыгающего робота под названием JumpRoACH, который весит всего 60 грамм, но обладает невероятной длиной прыжка 1,6 метра.
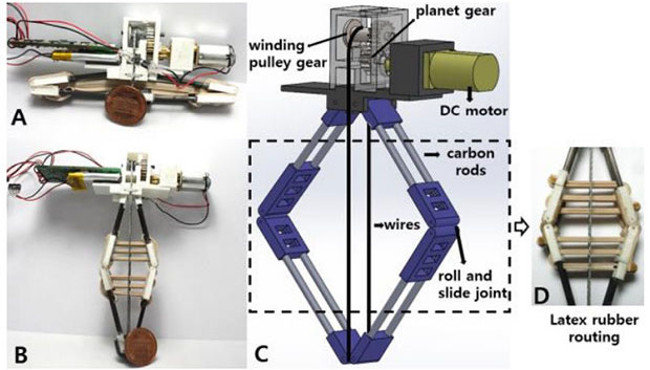
Сам механизм для прыжков состоит из ромбовидного шарнирного четырехугольника с суставами, как колени. Восемь латексных полос, когда они растягивают, используются для накопления энергии, при этом конструкция сжимается, что происходит благодаря тросу, шкиву и двигателю постоянного тока. В промежутках между шкивом и двигателем имеется зубчатая передача, включающая планетарный механизм, который действует как сцепление, когда двигатель меняет направление вращения. Все это позволяет роботу регулировать высоту прыжка. Двигатель может сжимать сочлененный механизм настолько, насколько это необходимо для сохранения энергии, позволяющей совершить заданный скачок.
Прыжковый модуль сам по себе может достигать почти 3 метров по вертикали, а будучи установленным внутри робота DASH он позволяет прыгать на высоту от 1,1 до 1,6 метра. Двигатель, который обеспечивает прыжки, также приводит в действие и крылья, которые робот использует, чтобы вернуться в нормальное положение после неудачного приземления.
К сожалению, здесь нет реальных крыльев, которые мы уже видели у некоторых быстро движущихся маленьких роботов. Фактически, данная конструкция вряд ли позволит обеспечить полет, но скольжение возможно, что может существенно увеличить расстояние, на которое робот перемещается с каждым прыжком.
Комментарии
(0) Добавить комментарий