")
Использование в робототехнике мягких приводов сулит не малые выгоды, потому что они дешевые (сделаны из пластмассы или из полимеров и воздуха), они эластичны и относительно безопасны для взаимодействующих с такими роботами людей, могут быть адаптированы для захвата самых разнообразных объектов. Но мягкая конструкция, по определению, не подходит там, где нужна жесткость. Так ли это?
Исследователи из Технического университета Берлина под руководством профессора Оливера Брока объединили мягкие пневматические приводы с зажимной системой, получив в результате привод с переменной жесткостью, который будет мягким, когда вы того захотите, и жестким, при необходимости.
Исследователи протестировали три различные пневматические системы зажима, в том числе с традиционной гранулированной структурой, а также две другие конструкции на основе наслаивающихся и перемежающихся слоев. В конечном итоге для окончательной конструкции они остановились на структуре чередующихся слоев, потому что она требует гораздо меньшее давление для зажима, хотя и сложнее в изготовлении. В принципе, она работает подобным образом: когда между слоями есть воздух, они могут скользить по отношению друг к другу, что позволяет сгибать привод. Когда воздух откачивается, слои прижимаются друг к другу, и привод твердеет. Вы можете сделать это вручную с помощью шприца, а также используя насос или в автономном режиме.
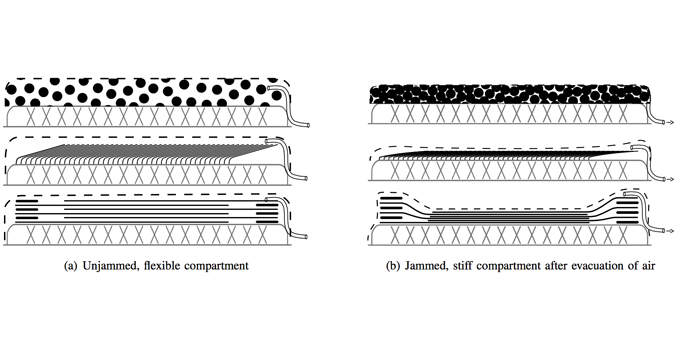
Три системы зажима были протестированы исследователями: гранулированный зажимной слой; зажим из перекрывающихся чешуевидных слоев; зажим из перемежающихся слоев. Зажимные полости обозначены пунктирными линиями, мягкий привод Pneuflex показан внизу. (а) гибкий привод в разжатом состоянии, (b) сжатая полость делает привод жестким.
В целом, жесткость привода может увеличиться в восемь раз, что приводит к увеличению усилия в 2,3 раза, это довольно значительно.
Результаты исследования по теме «Избирательное повышение жесткости мягких приводов за счет сжатия» были недавно представлены на конференции ICRA 2015 в Сиэтле.
Комментарии
(0) Добавить комментарий