")
Трудно было предположить, что одной из самых привлекательных форм для робота станет куб, но последние события подтверждают это. Уже не раз демонстрировались кубические роботы, которые могут балансировать и прыгать. В Массачусетском технологическом институте (MIT) создали еще один вариант кубика, который способен, подпрыгивать, скакать и перекатываться.
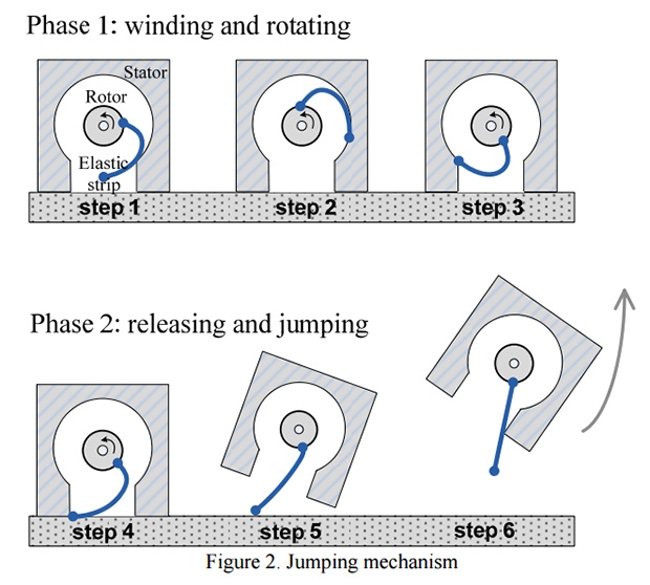
Это немного похоже на волшебство, но всему есть разумные объяснения. Внутри робота размещены два моторизованных ротора, один конец каждого из них соединен с плоскими петлями из пружинной стали. Вращение роторов приводит к перемещению пружинистой петли, которая резко распрямляется, когда доходит до прямоугольного отверстия на грани куба и сжимается при втягивании ее внутрь куба. Пока роторы вращаются, высвобождающаяся упругая энергия сжатой пружины позволяет кубику прыгать и накапливать энергию при втягивании пружины.
Пока ротор вращается, вы можете наблюдать более или менее непрерывно прыгающего робота. Контроль направления прыжка (за счет угла отрыва от поверхности) возможен с помощью различных отверстий для выброса пружин и вращения ротора вперед или назад.
В MIT протестировали две различных конструкции прыгающего куба. Один жесткий, а другой мягкий, каждый с длиной ребра 7 сантиметров, массой 200 граммов. Прыгали роботы одинаково (20 сантиметров по вертикали), но мягкий робот смог после приземления проскользнуть вдоль плоской поверхности, что удвоило расстояние его перемещения. Такие полностью автономные, со встроенными контроллерами, датчиками и аккумуляторными батареями кубики обладают существенной мобильностью в очень малом форм-факторе, при минимальной сложности.
Следующий вариант кубика будет иметь более мощный механизм, что позволит ему прыгать выше и дальше. При том, что мягкий куб прыгает дальше жесткого, исследователи также будут экспериментировать с другими мягкими материалами, чтобы определить какие работают лучше. В конечном счете, они хотели бы создать контроллер с обратной связью, что позволит роботу прыгать и автономно скакать по пересеченной местности, а добавление датчиков может обеспечить ряд интересных вариантов использования.
Оснащенный легкой полезной нагрузкой, включая миниатюрные камеры, робот может быть использован в исследовательских целях. Кроме того, может быть автоматически настроена беспроводная сеть датчиков для наблюдения с помощью группы прыгающих роботов.
Комментарии
(0) Добавить комментарий