")
Мягкая робототехника сделала в своем развитии огромный скачок за последнее десятилетие. Исследователи во всем мире экспериментируют с различными материалами и конструкциями, чтобы позволить когда-то жестким машинам с резкими движениями стать мягкими и гибкими, способными имитировать живые организмы и взаимодействовать с ними более естественным образом.
Вместе с тем повышение гибкости и подвижности снижает прочность, поскольку более мягкие материалы, как правило, не столь устойчивые к внешним воздействиям и не столь прочные, что ограничивает их использование в мощных конструкциях.
Недавно исследователи из института Wyss Гарвардского университета и лаборатории компьютерных наук и искусственного интеллекта Массачусетского технологического института (CSAIL) создали искусственные мускулы, основанные на принципе оригами, которые добавляют силу мягким роботам, позволяя им поднимать объекты, которые в 1 000раз превышают их собственный вес. При этом такие роботы используют только давление воздуха или жидкости, дающее столь необходимую силу для мягких роботов.
«Создание исполнительных механизмов на основе искусственных мускулов является одной из самых важных инженерных задач, - говорит Роб Вуд, один из участников исследования. - Теперь, когда мы создали приводы, обладающие свойствами, схожими с естественными мускулами, мы можем представить себе возможность создания почти любого робота для решения самых разнообразных задач».
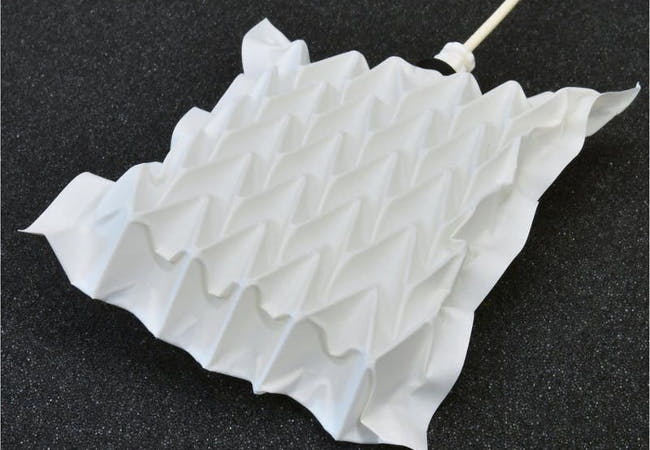
Каждая искусственная мышца состоит из внутреннего «скелета», который может быть сделан из различных материалов, таких как металлическое кольцо или лист пластмассы, сложенный определенным образом и заключенный в заполненную воздухом или жидкостью и запечатанную пластиковую или резиновую емкость. Понижение давления в емкости инициирует движение мышц. Это невероятно, но ни один другой источник энергии или человеческое участие не требуется для управления движением мышц — оно полностью определяется формой и составом скелета.
Одна из ключевых особенностей этих мышц состоит в том, что они программируемые, в том смысле, что проектирование изгиба скелета определяет способ перемещения всей конструкции. Этот подход позволяет сделать мускулы очень компактными и простыми и, таким образом, более подходящими для мобильных или смонтированных на корпусе систем, где не могут поместиться большие или тяжелые устройства.
Исследователи создали десятки мышц с использованием разных материалов, начиная от металлических пружин до упаковочной пены, экспериментировали с разными скелетами, которые могут сжаться до 10% от их исходного размера, поднять нежный цветок и скрутиться в катушку с помощью простого откачивания из них воздуха.
Комментарии
(0) Добавить комментарий