")
Немало людей хотело бы расширить свои возможности за счет дополнительных роботизированных конечностей. На Международной конференции ICRA в прошлом месяце исследователи из MIT представили свое исследование «Независимое, произвольное управление дополнительными роботизированными конечностями».
Эта работа призвана помочь в создании системы управления для закрепляемой на талии пары роботизированных конечностей, легких и удобных в использовании, не мешающих контролировать свои настоящие руки и ноги.
Управление дополнительными роботизированными конечностями является определенной проблемой. Они могут мешать, когда человек захочет использовать свои основные конечности, например, при ходьбе.
Аспирант Федерико Париети и профессор Гарри Асада из МIТ задумали создать способ манипулирования парой дополнительных конечностей, который не мешал бы полноценно управлять и обычными ногами и руками. Чтобы понять, как это делать, им также необходимо было выяснить, способен ли человеческий мозг обрабатывать шесть отдельных конечностей вместо четырех. Предлагаемое решение предполагает использование нескольких групп мышц туловища для управления роботизированными конечностями. При этом потребуется пройти некоторое обучение.
Вот как они объясняют свою идею. Для того, чтобы контролировать дополнительные роботизированные конечности также, как части тела пользователя, нужны произвольные сигналы, которые не зависимы от движений естественных конечностей и удобны для регистрации. Одно из подходящих решений было изучено в проведенном исследовании – это использование генерируемых торсом сигналов мышечной активности.
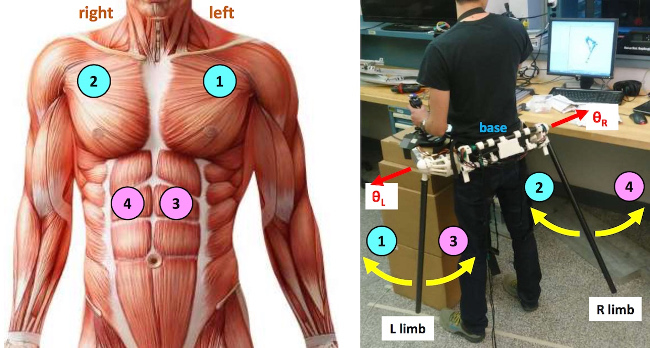
Для управления роботизированными конечностями используются четыре датчика ЭМГ (электромиография). Два наложены на грудные мышцы и два на брюшные мышцы. Напрягая левую мышцу на груди можно переместить вперед левую дополнительную конечность. При этом работа левой брюшной мышцы перемещает конечность в обратном направлении. На первый взгляд, делать это неудобно, но основная проблема здесь в том, сможет ли мозг адаптироваться к использованию новых групп мышц, чтобы одновременно задействовать шесть конечностей в произвольных направлениях. Другими словами, сможет ли ваш мозг справиться с ходьбой, используя при этом основные руки и управляя двумя дополнительными конечностями?
Далее ученые планируют рассмотреть возможности использования других групп мышц для добавления степеней свободы или даже нескольких дополнительных конечностей. Они предполагают, что для этой цели подойдут трапециевидные и широчайшие мышцы спины, а также мышцы плеч.
Трудно предположить, как мозг будет управляться с четырьмя лишними руками, но это верный способ выиграть чемпионат мира по боксу.
Комментарии
(0) Добавить комментарий