")
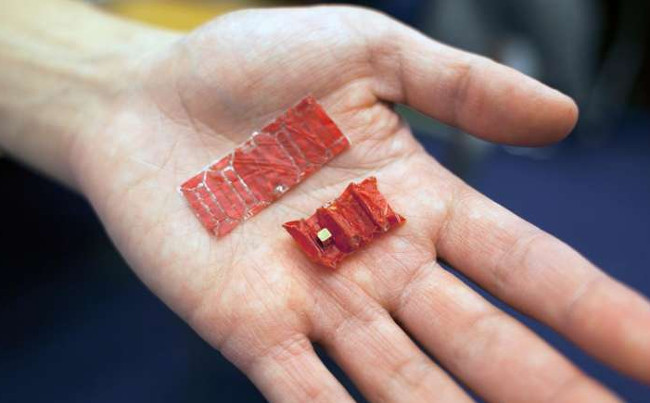
Исследователи из Массачусетского технологического института, Шеффилдского университета и Токийского технологического института представили новую разработку на основе техники оригами. Это крошечный робот, который раскладывается из капсулы и способен, с помощью внешних магнитных полей, перемещаться по желудку, удаляя инородные предметы или залечивая раны.
Ученые объясняют, что для манипуляций внутри организма пациента необходимы именно небольшие контролируемые системы роботов без проводов. Представленный робот – это модификация модели, показанной в прошлом году, со значительными конструктивными изменениями. Как и предыдущая версия, робот перемещается, присоединяясь к поверхности за счет трения при движении, а затем отсоединяется, изменяя распределение веса. Помимо этого, как и предыдущие оригами-роботы, новинка состоит из двух слоев структурного материала, между которыми заключено вещество, сжимающееся при нагревании. Разрезы внешних слоев определяют, как именно робот сложится при сокращении среднего слоя.
Однако одно из важных изменений в новой разработке заключается в использовании биосовместимого материала. Из-за этого робот стал мягче, поэтому исследователи разработали конструкцию с меньшим количеством надрезов. В результате испытаний ученые решили использовать в качестве внутреннего материала сушеный свиной кишечник, который применяется для изготовления сосисок. Внешний слой сделан из биоразлагаемой пленки Biolefin.
Кроме того, учитывая, что желудок человека наполнен жидкостью, роботу предоставили также новый способ передвижения в воде с помощью плавника без прикрепления к стенкам желудка. В связи с нововведениями корпус робота стал более плоским, а самого робота удалось сжать настолько, что он помещается в капсулу для глотания.
В процессе разработок ученые остановились на прямоугольном роботе с перпендикулярными складками, между которыми расположен магнит, реагирующий на изменение внешних магнитных полей. Исследователи управляют роботом, в основном, за счет круговых движений – быстрое вращение заставляет его крутиться на месте, а медленное – повернуться вокруг одной из опор.
В качестве эксперимента ученые решили применить робота для извлечения батарейки, поскольку это достаточно опасно в случае ее закрепления на стенке желудка. Для испытаний использовалась модель желудка из силикона, созданная на основе данных о механических свойствах свиного желудка. Кислотная среда имитировалась с помощью смеси воды и лимонного сока. Робот, управляемый магнитными полями, сумел успешно извлечь батарейку.
Комментарии
(0) Добавить комментарий