
На основе представленного в прошлом году экскаватора для аварийно-восстановительных работ японские исследователи создали прототип конструкции с дистанционным управлением, которая имеет два манипулятора, способные вращаться в диапазоне 360 градусов вокруг своего центрального блока.
Команда также разработала механическую руку с четырьмя пальцами, которая должна помочь роботу справиться с тяжелыми строительными работами.
Разработанный для решения проблем дистанционного управления и мобильности, которые имеются у стандартного тяжелого строительного оборудования при работе в экстремальных условиях, этот прототип снабдили сразу двумя гидравлическими манипуляторами с круговым вращением. Сообщается, что такая конструкция дает роботу повышенную устойчивость при высокой нагрузке, а также обеспечивает разнообразные варианты использования.
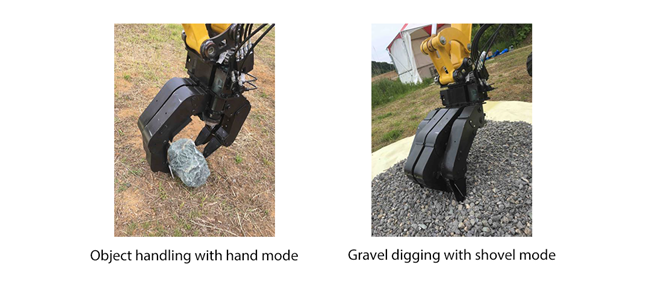
Команда разработала для строительного робота двух-функциональное приспособление с четырьмя пальцами, которое может работать как захват для сбора мусора или в качестве экскаватора для выгребания щебня. Оператор может устанавливать усилие сжатия, а форма захвата может меняться в зависимости от задачи.
Как и в случае с предыдущим роботом, силовая обратная связь создает у оператора ощущение касания выбранных объектов. Вид сверху и обзор вокруг обеспечивает дрон, который передает в режиме реального времени контроллеру видео, поэтому нет необходимости в установке камер на самом робо-экскаваторе.
Прототип робота был создан в рамках программы инновационных технологий с участием университетов Осаки, Кобе, Тохоку, Токио и Токийского технологического института.
На следующем этапе будет проведена доработка и совершенствование конструкции перед выпуском робота в качестве инструмента для ликвидации последствий стихийных бедствий и катастроф.
Комментарии
(0) Добавить комментарий