
Мягкие роботы стали перспективной технологией для приложений, требующих безопасности и адаптивности. Но интеграция сенсорных и управляющих систем без ущерба для их мягкости, форм-фактора или возможностей представляет собой серьезную проблему,
Для решения этой проблемы исследовательская группа из Ulsan National Institute of Science and Technology (UNIST) под руководством профессора Джиюна Кима и профессора Джонбума Бэ разработала технологию "мягкого клапана" - универсальное решение, интегрирующее датчики и управляющие клапаны при сохранении полной мягкости.
Традиционно мягкие тела роботов сосуществуют с жесткими электронными компонентами для обеспечения восприятия. В исследовании, проведенном корейской исследовательской группой, представлен новый подход к преодолению этого ограничения путем создания мягких аналогов датчиков и управляющих клапанов, работающих без электричества. Полученная деталь в форме трубки выполняет двойную функцию: распознает внешние раздражители и точно управляет движением, используя только давление воздуха.
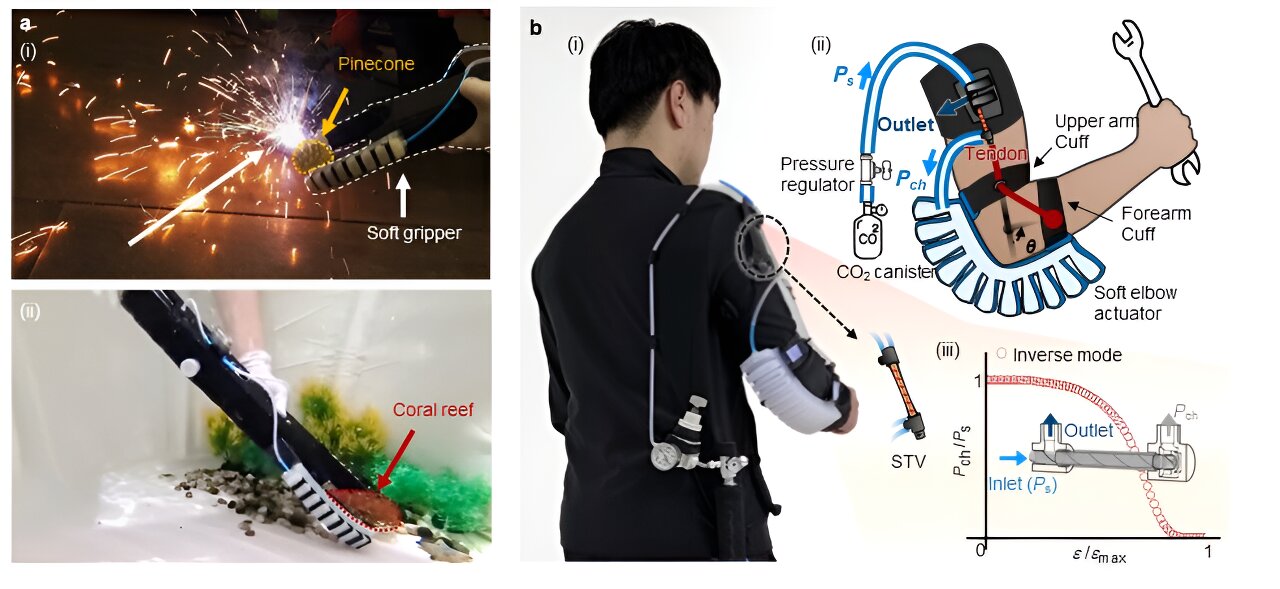
Благодаря отсутствию необходимости в компонентах, зависящих от электричества, эти полностью мягкие клапаны обеспечивают безопасную работу под водой или в условиях, где возможно образование искр, и одновременно снижают весовую нагрузку на робототехнические системы. Кроме того сообщается, что каждый компонент стоит около 800 вон, по нынешнему курсу чуть менее 60 рублей.
"Предыдущие мягкие роботы имели гибкие тела, но в качестве датчиков и блоков управления приводами использовали жесткие электронные детали, - пояснил профессор Ким. - Наше исследование направлено на изготовление датчиков и блоков управления приводами из мягких материалов".
Кликните для увеличения
Исследовательская группа продемонстрировала различные варианты применения этой технологии. Они создали универсальные захваты, способные деликатно брать хрупкие предметы, такие как картофельные чипсы. Кроме того, они успешно применили эти мягкие компоненты для разработки носимого локтевого экзоскелета для снижения нагрузки на мышцы при выполнении повторяющихся задач или напряженной деятельности, связанной с движениями рук. Он автоматически регулируется в зависимости от угла, под которым согнута рука человека, что позволило снизить силу, действующую на локоть при ношении робота, в среднем на 63%.
Мягкий клапан работает за счет использования воздушного потока в структуре, имеющей форму трубки. Когда к одному концу трубки прикладывается напряжение, спирально намотанная нить внутри сжимает ее, управляя притоком и оттоком воздуха. Такое движение обеспечивает точность и гибкость движений без использования электрической энергии.
Кроме того, исследовательская группа подтвердила, что, программируя различные структуры или количество нитей в трубке, можно точно управлять изменениями воздушного потока. Такая возможность позволяет настраивать устройство в соответствии с конкретными ситуациями и требованиями, обеспечивая гибкость реакции приводного устройства даже при постоянном приложении внешних сил к концу трубки.
Статья "A soft, self-sensing tensile valve for perceptive soft robots" опубликована в журнале Nature Communications.
Комментарии
(0) Добавить комментарий