")
Есть два варианта для управления роботом внутри человеческого тела. Либо вы пытаетесь построить какого-то сложного и крошечного робота в виде подводной лодки с автономным перемещением и навигацией, что очень трудно сделать, либо можно поступить проще.
Сделать робота настолько маленьким, что он способен будет реагировать на магнитные поля, что позволяет управлять им извне достаточно мощными магнитами. Последний подход гораздо менее сложный, но у него есть один существенный недостаток. Дело в том, что очень трудно управлять несколькими роботами.
Действие магнитного поля нелегко ограничить определенной зоной. Реально, если вы используете что-то вроде установки клинической магнитно-резонансной томографии, создаваемое магнитное поле независимо от уровня градиента будет влиять одинаково и на одного робота, и на целый рой.
Одним из возможных способов обойти это ограничение является использование избирательных управляющих входов у роботов. Но для однородных роботов сделать это гораздо сложнее.
Исследователи из компании Philips в Гамбурге описывают технологию, которая может использовать магнитные поля для избирательного воздействия на отдельных микророботов или отдельных компонентов робота, даже если они сделаны из одного материала и находятся в пределах одной области.
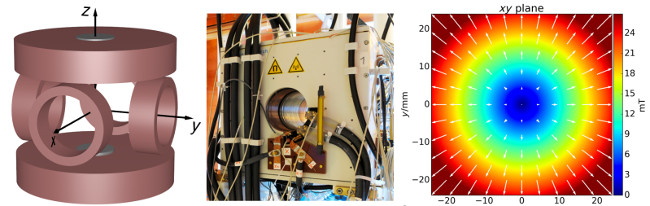
Вот как это работает: глобальное магнитное поле внутри устройства имеет отверстие, называемое свободной точкой поля (СТП), где складываются несколько магнитных полей (каждое генерируется отдельной катушкой). Внутри СТП уровень градиента магнитного поля низкий. Это не поможет двигать объекты, но поможет заблокировать все, что вне СТП. Затем, используя точно управляемое вращающееся магнитное поле, которое вращается внутри СТП, можно выбрать блокируемые и свободно вращаемые объекты.
Использованное в экспериментах оборудование обеспечивало точность около 3 миллиметров. Исследователи предлагают целый ряд возможностей, в которых этот метод может найти практическое использование.
Комментарии
(0) Добавить комментарий