")
С помощью нового инструмента для проектирования, созданного в Лаборатории Disney Research и Университете Карнеги-Меллона, теперь даже новичок сможет спроектировать и собрать собственного шагающего робота, используя для этого 3D-принтер и сервоприводы.
Сначала нужно будет задать форму, размер и число ног для роботизированного существа, используя в интерактивном режиме интуитивно понятные инструменты и выбрав оптимальный вариант из предложенных. Гарантируется, что созданная конструкция сможет, не падая, перемещаться по вашему желанию и даже будет изменять походку.
«Прогресс в технологиях быстрого изготовления все более упрощает сборку роботов, но проектирование функционирующего робота по-прежнему остается сложной задачей, требующей инженерной подготовки», - говорит Маркус Гросс, вице-президент Disney Research. «Наша новая система позволит восполнить этот пробел и должна вызвать большой интерес у любителей техники и сообщества самодельщиков в целом».
Команда разработчиков представила свою систему на Конференции по компьютерной графике и интерактивным технологиям ACM SIGGRAPH 2015. Этот инструмент позволяет пользователю создавать структуру и движения робота, получая немедленную обратную реакцию с ожидаемым реальным поведением. Интерфейс конструирования имеет две области просмотра: одна позволяет редактировать структуру и движения робота, а вторая отображает, как эти изменения, вероятно, скажутся на поведении робота.
Пользователь может загрузить начальное, скелетное описание робота, и система создаст первоначальную геометрию, поместит двигатель в каждом сочленении. Затем пользователь может редактировать структуру робота, добавляя или удаляя двигатели, или регулируя их положение и ориентацию.
Система берет на себя большую часть не интуитивной, утомительной работы по планированию передвижения робота. Пользователь, тем не менее, способен регулировать модель перемещения ног робота и стилистические элементы его движения.
Исследователи разработали эффективный метод оптимизации, использующий динамическую модель приближений для создания устойчивой походки роботов с разным количеством ног. В отличие от обычных методов, которым может потребоваться несколько минут для вычисления алгоритма движения, здесь этот процесс занимает всего несколько секунд, повышая интерактивность инструмента проектирования.
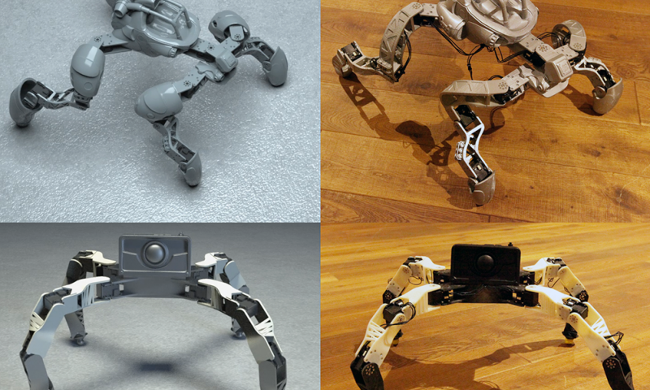
После того, как процесс проектирования будет завершен, система автоматически генерирует 3D геометрию для всех частей тела, в том числе разъемы для двигателей — все, что может быть отправлено на 3D-принтер для изготовления. Используя свою систему, исследователи спроектировали и собрали двух четвероногих роботов и обнаружили, что в целом движения прототипов согласуются с предсказанным в процессе моделирования поведением.
Комментарии
(0) Добавить комментарий