
В энергетическом отношении роботы не являются автономными. Они не способны, как животные, работать непрерывно и бесконечно долго. Есть, конечно, роботы, которые работают автономно в течение длительного времени. Но лучшим вариантом в некоторых ситуациях могут быть роботы, которые сами ищут источники энергии, подобно животным, заботящимся о собственной пище.
Хотя это может показаться немного сумасшедшей идеей, топливные элементы, которые заполнены живыми микробами, существуют. В Великобритании, в Лаборатории робототехники г. Бристоля разработали робота под названием Row-bot, который может плавать, собирая энергию непосредственно из воды с помощью микробного топливного элемента в качестве искусственного желудка.
По словам исследователей, микробные топливные ячейки (МТЯ) вырабатывают электроэнергию за счет «электронов, активируемых окислительно-восстановительной реакцией, которая происходит в процессе электрогенного бактериального анаболизма». Они объясняют, что «сырая органическая биомасса используется одновременно и в качестве модификатора для бактериальной культуры, и как анолит, который активирует реакцию экологически биосовместимых средств генерации электроэнергии. Проще говоря, микробы едят всякую дрянь, содержащуюся в воде, и вырабатывают электроэнергию.
До тех пор, пока есть достаточно воды с растворенными в ней веществами, чтобы микробы были сытыми и довольными, они будут давать электроэнергию, которую можно использовать для питания робота. МТЯ работают в любой воде, в том числе в пресной воде рек и озер, в морской воде и даже в сточных водах. Они, на самом деле, очищают воды в процессе работы, что тоже удобно.
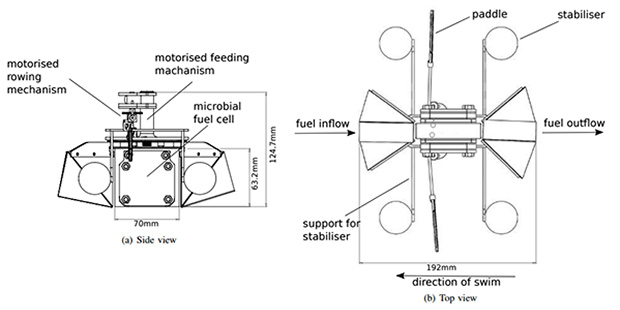
Однако, микробы крошечные и каждый из них производят очень мало энергии, поэтому для того, чтобы делать что-нибудь полезное, необходимо несколько топливных элементов или очень экономичный робот. Row-bot является очень эффективным роботом, созданным по образу водяного жука. Он имеет две боковые лопасти для передвижения, маленькую легкую камеру для обеспечения плавучести и микробный топливный элемент.
Робот имеет рот, чтобы глотать воду для топливного элемента, а также выходное отверстие сзади для выброса отработанной воды. Каждый раз, открывая рот, робот плывет вперед, глотает воду, переваривает ее в МТЯ в течение 3 минут, а затем выбрасывает ее продвигаясь вперед и освобождая место для следующего глотка. Row-bot запасает вырабатываемую МТЯ энергию в конденсаторе. В течение одного цикла (открытие рта, плавание с 10 взмахами лопастями, по 1 взмаху в секунду, а затем закрывает рот), он использует только 1,8 джоуля. Для перемещения на 20 сантиметров требуется около 1 джоуля энергии, все, что остается, может быть использовано для питания датчиков, лазерных излучателей или других элементов.
Пока у Row-bot есть вода для плавания, МТЯ делает его более или менее энергетически автономным. Хотя нынешняя конструкция создана в основном для интеграции МТЯ с приводами, чтобы увидеть, насколько хорошо все это работает. Требуется выполнить еще много доработок, например, для снижения сопротивления тела, и найти наиболее эффективное сочетание материалов для лопастей, а также изменить «шаг» робота, чтобы лучше имитировать реальных водяных жуков. Кроме того, может быть совместно соединено несколько МТЯ, если нужно больше мощности для внешних устройств.
В конце концов, исследователи предполагают, что подобные роботы могут быть разработаны для дистанционного зондирования, мониторинга и очистки окружающей среды.
Комментарии
(0) Добавить комментарий