")
Созданные из бумаги складные роботы в стиле оригами, как правило, требуют встроенных батарей или проводного подключения к источнику питания, что делает их более громоздкими и сложными, ограничивает их функциональность в сравнении с задумкой.
Группа исследователей из Института Висса и Гарвардского университета создала не требующих батарей роботов, которые приводятся в действие и контролируются с помощью магнитного поля.
Эти роботы способны выполнять сложные, повторяющиеся движения. В системе их управления использованы лишь пассивные электронные компоненты.
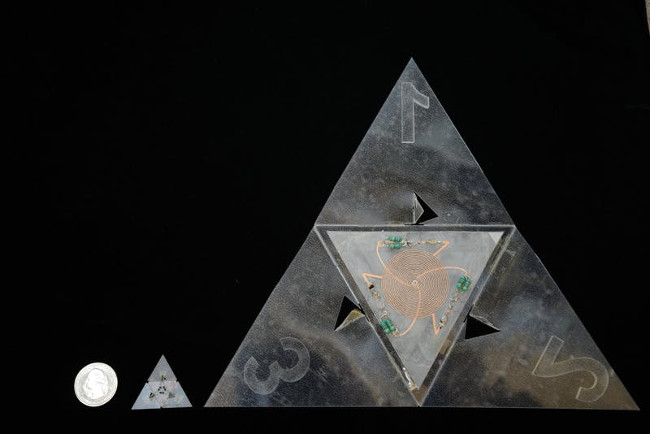
Похожие на треугольную пирамиду роботы собираются из плоских, тонких треугольников. Треугольник в основании шарнирно соединен с тремя боковыми треугольниками. К шарнирам прикреплены катушки из металлического сплава с памятью формы, которые могут восстанавливать свой первоначальный вид после деформации при нагреве до определенной температуры. Катушки растягиваются в «деформированном» состоянии при прохождении тока и возвращаются в свое первоначальное расслабленное состояние, сжимаясь, как крошечные мышцы, и складывая внешние треугольники роботов в направлении центра. Когда ток прекращается, катушки вытягиваются из-за жесткости шарнирного сгиба.
Возбуждающая электрический ток электромагнитная энергия передается беспроводным способом, подобно беспроводным зарядным устройствам для сотовых телефонов и другой малогабаритной электроники. При подключении источника питания внешняя катушка генерирует магнитное поле, которое индуцирует ток в цепях робота, тем самым нагревая катушки и вызывая сгибание.
Для раздельного управления катушками использованы настраиваемые на определенную частоту контуры в каждой катушке. Изменяя частоту внешнего магнитного поля, исследователи смогли заставить каждую катушку сжиматься независимо от других.
Подобно человеческим мышцам, катушки позволяют сжимать и расслаблять структуру корпуса робота. Чтобы продемонстрировать эту способность, команда построила небольшую роботизированную руку, способную сгибаться влево и вправо, а также захватывать и отпускать объект.
Имеется целый ряд применений для такой минималистской роботизированной технологии. Например, вместо того, чтобы использовать неудобный эндоскоп для осмотра через горло, пациент мог бы просто проглотить микро-робота, который способен передвигаться и выполнять простые задачи, получая питание от катушки вне тела. Использование в качестве источника питания катушки гораздо большего размера, порядка нескольких метров в диаметре, может обеспечить беспроводную связь без батареи между несколькими «умными» объектами в доме.
Команда построила из сложенной бумаги множество роботов разной формы и размера, чтобы показать, что эта технология может вместить множество схемных шаблонов и успешно масштабироваться для больших и малых устройств.
«Сегодня возможности медицинских устройств обычно ограничены размером батарей питания, в то время как эти роботы-оригами с дистанционным управлением не имеют подобных ограничений и, возможно, предлагают в будущем совершенно новые, минимально инвазивные подходы к медицине и хирургии», - говорит Дональд Ингбер, директор из института Висса.
Комментарии
(0) Добавить комментарий