Группа исследователей из Университета Тохоку и Японского института науки и техники разработала молекулярного робота, состоящего из ДНК и молекул белка. Молекулярный робот был разработан путем интеграции молекулярных механизмов в искусственную клеточную мембрану.
В ответ на специфический сигнал ДНК робот может начинать и останавливать функцию изменения своей формы.
Это первый случай, когда молекулярная роботизированная система распознает сигналы и контролирует свою форму. Таким образом, молекулярные роботы в ближайшем будущем смогут функционировать подобно живым организмам.
Используя такие сложные бимолекулярные соединения, как ДНК и белки, живые организмы выполняют важные функции. Например, лейкоциты могут преследовать бактерии, воспринимая химические сигналы и приближаясь к цели. В области химии и синтетической биологии с использованием биомолекул создаются элементарные технологии для изготовления различных молекулярных механизмов, включая датчики, процессоры и приводы.
Молекулярный робот является искусственной молекулярной системой, которая строится путем интеграции молекулярных механизмов. Исследователи полагают, что реализация такой системы может привести к значительному прорыву – созданию биороботов на молекулярной основе.
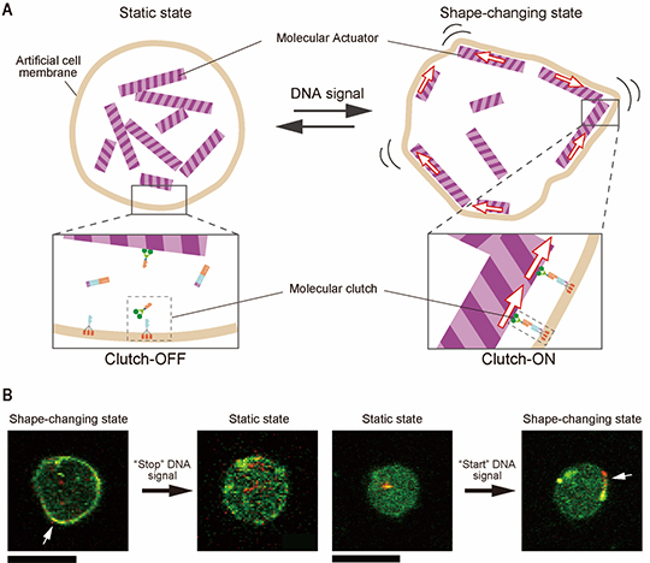
Молекулярный робот, разработанный исследовательской группой, чрезвычайно мал – около одной миллионной доли метра и сравним с клетками человека. Он состоит из молекулярных актуаторов (actuator), сформированных из белка и молекулярного зацепления (clutch) на основе ДНК. Форма тела робота (искусственная клеточная мембрана) может быть изменена актуаторами, при этом формируемое актуаторами усилие может контролироваться молекулярными устройствами зацепления (A).
Исследователи продемонстрировали экспериментально, что молекулярный робот может начать и остановить изменение формы в ответ на специфический сигнал ДНК (B).
«Используя более 20 химических веществ в различных концентрациях, нам потребовалось полтора года, чтобы найти оптимальные условия для работы наших молекулярных роботов», - говорит руководитель исследования, доцент Син-Ичиро Номура из университета Тохоку. Наблюдая через микроскоп, можно было видеть, что разработанная система сцепления ДНК работала отлично, несмотря на сложные условия внутри робота.
Реализация молекулярного робота, который может функционировать в маленькой и сложной среде, такой как человеческий организм, как ожидается, значительно расширит возможности роботизированной инженерной биомедицины.
Результаты этого исследования могут привести к технологическим разработкам, которые могли бы помочь в решении таких важных проблем, как робот для обработки живых выращиваемых клеток и робот для мониторинга и контроля загрязнения окружающей среды.
Комментарии
(0) Добавить комментарий