
Почти через 40 лет после первого фильма хроника «Звездных войн» продолжилась очередной серией «Звёздные войны: Пробуждение силы». Непреходящий интерес к дроидам С-3РО и R2-D2 говорят об увлечении многих людей роботами и искусственным интеллектом. Так несколько ученых из Университета Нотр-Дам работают над тем, чтобы сделать дроидов скорее объектом исследований, чем фантастики.
Обнаружение внимания и эмоций
Доцент психологии, информатики и инженерии Сидни Д´Мелло и его коллеги, исследуют эффект «блуждающего ума» и разрабатывают программные системы, которые могут определить, когда внимание человека смещается с поставленной задачи и переходит на другой объект. В перспективе исследователи намерены сделать компьютерные интерфейсы достаточно разумными, чтобы распознать ослабевающее внимание пользователя и принять меры.
Программное обеспечение системы отслеживает движения глаз человека с помощью ай-трекера, системы распознавания лица (используя веб-камеру) и шаблонов взаимодействия с пользователем. Если система определяет, что внимание человека ослабляется, она может приостановить взаимодействие и сообщить об этом, запланировать различные типы взаимодействия или пометить взаимодействие для дальнейшего изучения. Кроме того отслеживаются такие эмоции, как растерянность, разочарование, восхищение и скука для того, чтобы расширить потенциал взаимодействия, чтобы охватить то, что люди думают и чувствуют в дополнение к тому, что они говорят или делают.
Персональные роботы
Сегодня Лорел Рик и Клэр Бут Люс, доценты информатики и инженерии, создают роботов, способных чувствовать и реагировать, адаптироваться к людям. До недавнего времени работающие роботы были отделены ограждениями от обслуживающего персонала, но теперь они должны работать совместно с людьми в постоянно меняющейся обстановке. В исследованиях Рика затронуты фундаментальные и прикладные проблемы, которые делают таким сложным это взаимодействие в реальном мире.
Один проект исследует командные взаимодействия, создание системы машинного зрения и алгоритмы машинного обучения, способные чувствовать, как люди координируют свое поведение в режиме реального времени. Эта база знаний затем используется роботами Рика для автоматической адаптации их поведения при взаимодействии с людьми. Помимо информирования роботов, результаты этого проекта будут также использоваться в медицинских учреждениях, чтобы сделать роботов более адаптивными, помогая людям с ограниченными возможностями. А также для проектирования новых систем зондирования, чтобы помочь хирургам избежать фатальных ошибок в процессе операций.
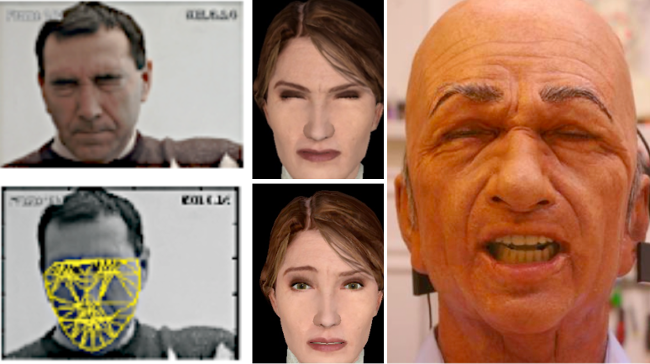
В другом проекте Рик совершенствует технологии для наиболее часто используемых человекоподобных роботов в мире на сегодняшний день: роботизированных симуляторов пациента. Это роботы величиной с человека, на которых врачи обучаются лечить больных. К сожалению, в таких современных системах отсутствует ключевая особенность. Несмотря на критическую важность выражения лица для диагностики и эффективного взаимодействия, ни один из имеющихся сегодня в продаже тренажеров не имеет выразительного лица, что нарушает реализм моделирования.
Отмеченные наградой NSF CAREER исследования Рика включают в себя проектирование интеллектуальных, интерактивных, высококачественных роботизированных систем симуляции пациента, которые могут выразить сигналы боли, инсульт и неврологические нарушения.
Шагающие роботы
Хотя у дроида С-3РО походка немного неуклюжая, все равно она явно более походит на человеческую, чем у большинства сегодняшних человекоподобных роботов. Используя для ходьбы технологию Zero-Moment Point (ZMP), эти роботы используют тщательно спланированные пешеходные движения по идеально ровной площадке, имеют большие ступни ног для обеспечения устойчивости. Этот подход является относительно простым, но неэффективным, поскольку он не учитывает естественную динамику ходьбы, что бессознательно делают люди для минимизации расходуемой энергии.
Многие из исследований по двуногим роботам в Лаборатории биомеханики и движения Университета Нотр-Дама нацелены на разработку методов, позволяющих роботам ходить более динамично, как это делают нормальные люди. Один из подходов использует математический метод, известный как гибридная нулевая динамика (HZD), что позволяет получить устойчивую походку даже когда у робота отсутствует голеностоп, а стопа настолько мала, что ее можно считать одной точкой. Как у балерины двигающейся на носочках.
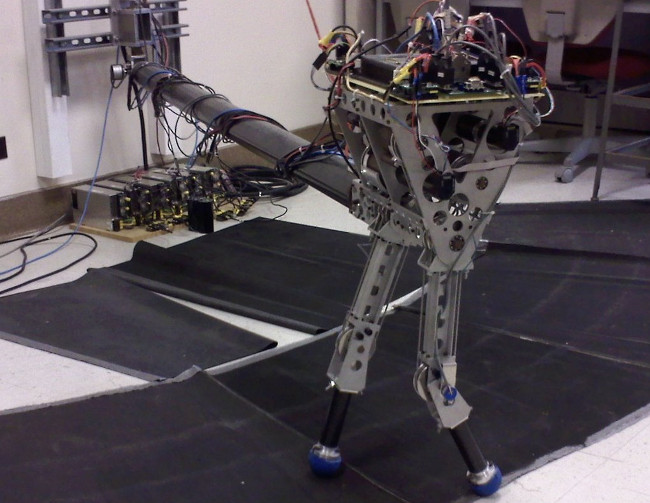
Альтернативная стратегия применяет прямую нелинейную оптимизацию, чтобы генерировать динамическую походку. Пока HZD не хватает гарантированной стабильности. Технология применима к разнообразным конструкциям роботов. Оба метода доказали свою эффективность в экспериментах с заказным роботом.
Недавно, на корпусе этого робота был установлен маховик, чтобы обеспечить устойчивость независимо от площади контакта ступни с землей. Дополнительным преимуществом такого подхода, как показала текущая работа, является то, что этот инерционный привод не только повышает устойчивость, но также может повысить эффективность движений в некоторых обстоятельствах.
Комментарии
(0) Добавить комментарий