")
Если говорить о конструкции руки робота, то существуют две типичные точки зрения. Есть роботизированные руки, которые просты и прямолинейны в исполнении операций, подобные двух или трех пальцевым захватам, которые надежно могут выполнять многие задачи. Также есть очень сложные руки с пятью пальцами, которые предназначены для полной имитации человеческих рук. И если вы хотите, чтобы ваш робот мог делать как можно больше и лучше, вам нужна рука максимально похожая на человеческую.
Из-за присущей реальной руке человека сложности устройства, биомиметические антропоморфные руки неизбежно сопряжены со множеством компромиссов, чтобы заставить их работать должным образом, при сохранении естественной формы. Чжэ Сюй и Эммануил Тодоров из Университета Вашингтона в Сиэтле – фанатики своего дела. Они сделали наиболее полную и кинематически точную (из когда либо созданных) биомиметическую, антропоморфную роботизированную руку, надеясь, в конце концов, полностью заменить человеческие руки.
Сюй и Тодоров решили начать с нуля, механически дублируя человеческую руку максимально точно, насколько это возможно. Сначала они провели лазерное сканирования костей человеческой руки, а затем 3D-печать подобных искусственных костей, что позволило им копировать нефиксированные оси суставов, как объясняет Сюй.
«Например, движение нашего большого пальца опирается на сложную форму трапециевидной кости, расположенной в запястно-пястном суставе (ЗПС). Из-за неправильной формы трапециевидой кости точное расположение осей суставов ЗПС является не фиксированным. Таким образом, ни одна из существующих антропоморфных робототизорованных рук не может восстановить естественные движения большого пальца с обычными механическими соединениями, которые требуют фиксированной оси вращения. Мы выполнили 3D-печать искусственных костей по модели лазерного сканирования костей реальной руки человека и соединили их с искусственными суставами пальцев, имеющими очень близкие к человеческим аналогам диапазон движения, жесткость и динамические характеристики. Конструкция нашей роботизированной руки однозначно сохраняет важную биомеханическую информацию руки человека на анатомическом уровне».
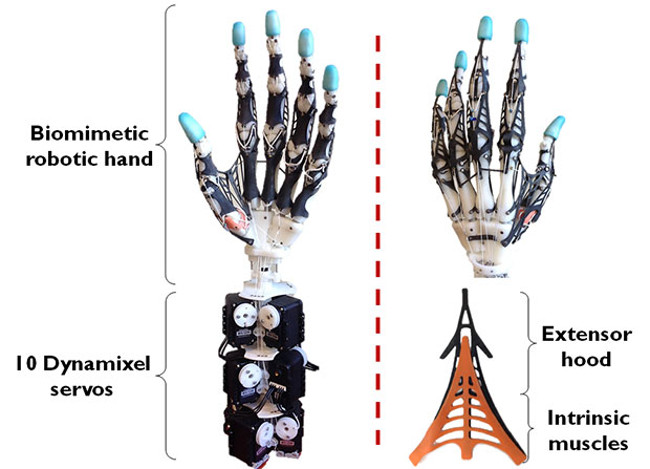
Суставные связки (которые стабилизируют суставы и контролируют диапазон их движения) изготовлены из высокопрочных струн. Нарезанные лазером резиновые вставки заменяют мягкие ткани, которые добавляют суставу податливость. Сухожилия сгибателей и разгибателей (для выпрямления и сгибания пальцев) также изготовлены из струны с нарезанными лазером большими листами резины для оболочки сухожилий и разгибателей.
Получается комплексная, перепончатая многослойная структура, оборачиваемая вокруг пальца, чтобы помочь управлять гибкостью и крутящим моментом. Заключительной частью руки являются мышцы, которые включают массив из 10 сервоприводов Dynamixel, кабель управления которыми близко имитирует запястье человеческой руки.
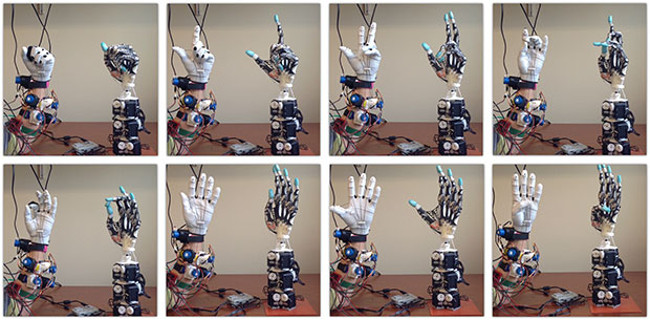
Помимо того, что рука получилась необычайно красивая и изящная, она очень точно может имитировать разнообразные захватывающие движения, управляясь с дистанционного манипулятора. Пользователи также могут выполнять сложные манипуляции без силовой обратной связи, что исследователи объясняют точным совпадением кинематики этой руки с настоящей человеческой рукой.
Разгадка действительно заключается в том, что рука, созданная по подобию человеческой руки, имитирует ее действия, в первую очередь благодаря конструкции, а не за счет особого программирования. Это дает много потенциальных преимуществ в телеманипуляции, поскольку оператор может более органично использовать ловкость собственных рук.
Что еще более интересно, исследователи предполагают, что их рука может быть использована «как 3D-каркасы для исследований регенерации конечности». Вот как это объясняет Сюй:
«Контроль протезов рук и ног во многом опирается на человеческий мозг. Поэтому такие же нейроортопедические технологии могли бы быть более эффективными, если конструкция протеза может быть больше похожа на свой биологический аналог. Биосовместимые материалы теперь могут быть распечатаны в виде костных структур, биологически искусственные связки были использованы для замены разорванной передней крестообразной связки, мышцы человека были успешно культивированы в чашке Петри, а периферические нервы также могут быть регенерированы при благоприятных условиях. Все эти перспективные технологии требуют подходящих каркасов для выращивания пересаживаемых клеток. Мы собираемся сотрудничать с исследователями-биологами и занимающимися разработкой тканей, чтобы глубже изучить возможности в этих областях и чтобы создавать биологически изготавливаемые приборы/каркасы в развивающихся областях нейроортопедии и регенерации конечностей».
Комментарии
(0) Добавить комментарий