")
Способность захватывать что-либо и осязать захватываемую поверхность у большинства роботов реализуется с помощью механизированных средств, которые могут быть чрезмерно громоздкими и жесткими. В Корнельском университете изобрели метод, позволяющий мягким роботам внутренне осязать все, что их окружает, примерно так, как это делают люди.
Группа исследователей, руководимая доцентом кафедры механической и аэрокосмической техники Робертом Шепардом, опубликовала статью, в которой описаны растягиваемые оптические волноводы, действующие как изгибаемые, удлиняемые датчики усилия в мягкой роботизированной руке.
Оптические волноводы с начала 1970-х годов используются для реализации ряда функций распознавания, включая тактильные, акустические и позиционные. Изначально сложным процессом было изготовление таких датчиков, но появление в последние 20 лет мягкой литографии и 3D-печати привело к разработке эластомерных датчиков, которые легко изготавливаются уже интегрированными в мягкие материалы для робототехники.
Группа специалистов из Лаборатории органической робототехники разработала четырех-этапный процесс мягкой литографии для получения волновода, через который распространяется свет, а наружная оболочка включает светодиоды и фотодиоды.
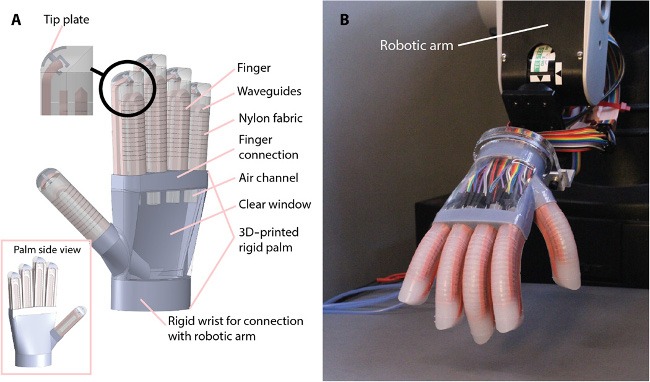
Чем больше деформируется протез руки, тем больше света теряется в волноводе. Этот меняющийся световой поток регистрируется с помощью фотодиода, что позволяет протезу «чувствовать» предметы.
Группа использовала эти оптоэлектронные протезы для выполнения различных задач, в том числе для захватывания и исследования формы и текстуры. Самое примечательное оказалось в том, что рука способна была ощупать три помидора и определить наиболее спелые по степени мягкости.
Исследователи отмечают, что эта технология найдет множество других потенциальных применений, в том числе, в биороботах для космических исследований.
Дальнейшее совершенствование оптических волноводов для мягкой робототехники будет направлено на расширение сенсорных возможностей, в частности, используя для этого 3D-печатные, более сложные формы датчика и машинное обучение для помощи в разделении сигналов от множества датчиков.
Комментарии
(0) Добавить комментарий