
Для управления современными роботизированными протезами пациент должен научиться представлять себе контролируемую фантомную руку, а также несколько простых движений, таких как зажим двумя пальцами.
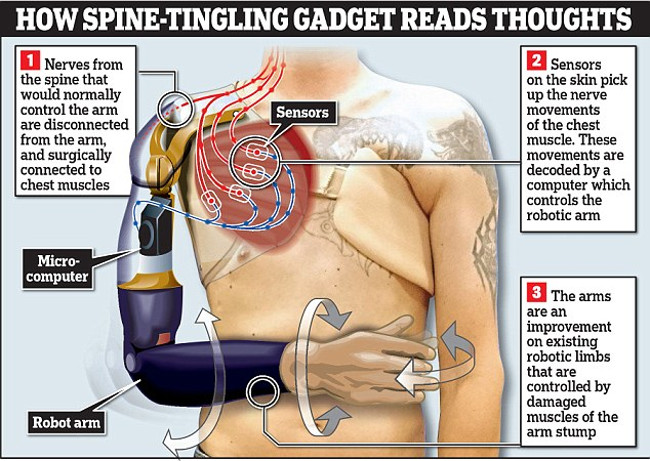
Новая технология с помощью датчиков интерпретирует электрические сигналы, посылаемые от двигательных нейронов позвоночника, и использует их в качестве команд.
Двигательный нейрон – это нервная клетка, которая находится в спинном мозге. Называемые аксонами, волокна спинного мозга доходят непосредственно до контролируемых мышц тела.
Роботизированные протезы руки в настоящее время контролируются пользователем за счет подергивания остатков мышц в плече или руке, которые часто бывают повреждены. Эта технология достаточно проста в своей функциональности, но только при выполнении одной или двух команд захвата. Поэтому около 40-50% инвалидов во всем мире вынуждены будут отказаться от этого вида роботизированных протезов.
Опубликованное недавно в журнале Nature Biomedical Engineering исследование позволяет обнаружить сигналы от двигательных нейронов позвоночника, направленные к неповрежденным в результате ампутации остаткам мышечных волокон. Это означает, что все сигналы могут быть непосредственно обнаружены с помощью датчиков, подключенных к протезу, что позволит, в конечном счете, запрограммировать больше команд для роботизированного протеза и сделать его более функциональным.
Руководитель исследования д-р Дарио Фарина сейчас работает в Имперском колледже Лондона, а ранее провела ряд исследований в медицинском центре университета Геттингена в Германии. В проекте участвовали соавторы исследования из Европы, Канады и США.
Исследователи провели лабораторные эксперименты с шестью добровольцами, у которых руки были ампутированы до плеча или чуть выше локтя. После некоторого физиотерапевтического обучения инвалиды смогли выполнять более широкий спектр движений, чем это было бы возможно с помощью классических, управляемых мускулами робототизированных протезов.
Добровольцы смогли двигать локтевым суставом и делать радиальные движения, перемещая запястье из стороны в сторону, а также сжимали и разжимали кисти рук. Это означает, что пользователь имеет все основные возможности и функции реальной руки.
Необходимы будут дальнейшие усовершенствования, чтобы сделать технологию более надежной, но исследователи полагают, что массовый выпуск текущей модели может начаться в течение ближайших трех лет.
Комментарии
(1) Добавить комментарий