")
В финале прошлогоднего конкурса DRC (DARPA Robotics Challenge) робот DURUS медленно и неуклонно совершал прогулки длиной 2 км в течение двух с половиной часов на одной зарядке батареи. Это было признано большим достижением. Особенно в сравнении с оригинальной версией робота ATLAS, чудовищно непрактичной, по крайней мере, с точки зрения передвижения.
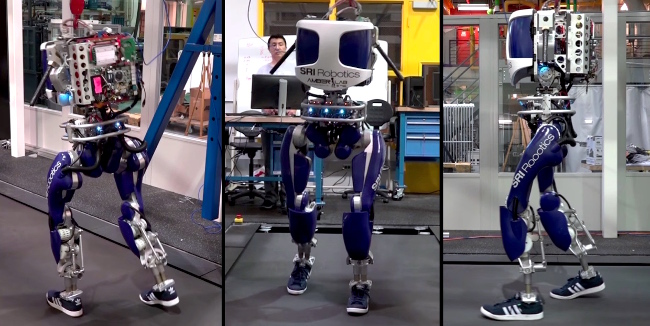
DURUS теперь может ходить так же, как и человек, и даже носить нормальную (и стильную) обувь, как у человека. Среди основных планируемых усовершенствований робота после прошлогоднего конкурса DARPA было более естественное поведение стопы, включая человекоподобные контакты пятка-носок.
DURUS имеет намного лучшую обувь, чем другие роботы. Но чрезвычайно важным является и тот факт, что вы можете запустить его в автономную прогулку в течение длительного периода времени. Если мы хотим создавать роботов, которые могут делать практические вещи вне стен лаборатории, они должны быть способны к длительной автономной работе.
Ключевой особенностью человеческой походки является постановка ступни с накатом от пятки на носок. Большинство человекоподобных роботов, даже чрезвычайно дорогие, как ATLAS , ASIMO, Hubo и HRP, даже не пытаются делать это. Вместо этого они переставляют большие, плоские ноги, которые обеспечивают большую площадь контакта с землей, чтобы максимизировать устойчивость. При этом роботы имеют странный вид с «крадущейся» походкой, чтобы пытаться сохранить центр тяжести над гигантскими ногами, поскольку, в противном случае, они имеют тенденцию к падению.
Эффективность DURUS достигается за счет оптимального сочетания программного и аппаратного обеспечения. Аппаратная часть робота включает здоровенные пружины для лодыжки, чтобы помочь сохранить и освободить энергию с каждым шагом, наряду со ступнями, предназначенными для плавного перекатывания, отталкиваясь от земли.
Конкретной целью данного проекта является создание универсальной парадигмы управления, применяемой в гуманоидных роботах, а также в протезах и экзоскелетах.
Комментарии
(0) Добавить комментарий