
Не так давно в Шанхае, на базе Колледжа архитектуры и городского планирования при Университете Тунцзи, прошла трехнедельная ярмарка Digital Future, в рамках которой проводилось большое количество мастер-классов. На одном из них команда дизайнеров, вдохновленная природными свойствами паутины, представила проект под названием Robotic 3D Spatial Printer. Дизайнеры разработали шестиосевой 3D-принтер, задача которого, по словам команды – «разрушить границы между дизайном и производством».
«Технологии цифрового производства, такие как применение промышленных роботов, отлично зарекомендовали себя в качестве замены человеческой рабочей силы, – рассказывает один из дизайнеров. – Тем не менее, потенциал этих технологий с точки зрения дизайна разработан недостаточно. Более того, чем глубже мы исследовали цифровое производство, тем очевиднее становился разрыв между дизайном продукта и процессом его создания. В этом проекте нам важно понять, как встроить цифровое производство в оба этих процесса. В каком-то смысле, это возвращение к ремесленничеству в цифровой эре».
Стратегия любого проекта начинается с участвующих в нем людей, а для них зачастую особенно важен источник вдохновения. Шанхайские дизайнеры решили обратиться к природе.«Работая над шестиосевым 3D-принтером, мы применили стратегию, основанную на наблюдении за природой и подражании ей. Внимательно рассмотрев примеры 3D-форм, встречающихся в природе, мы использовали биомиметический подход, стараясь воссоздать увиденные нами процессы. Благодаря роботам производства KUKA, мы смогли полностью реализовать производственный процесс, основанный на подражании природе», – говорят дизайнеры.
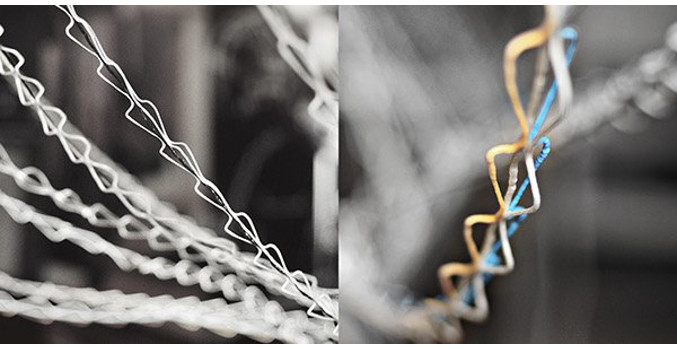
Первая стадия процесса – «Концепция биомиметики и симуляция». На этом уровне дизайнеры обсуждали свое видение проекта и ставили конкретные цели. Именно в это время возникла идея имитировать паутину. Дизайнеры отметили, что каждый отдельный участок паутины состоит из одной центральной нити и трех других, расположенных волнами по сторонам. Таким образом, прочность паутины основана, в том числе, и на ее структуре.
Команда решила, что этот принцип можно успешно применить в 3D-печати. В результате дизайнеры рассчитывали добиться большей прочности и долговечности напечатанных объектов, чем у тех, которые можно получить с использованием 3D-принтеров в виде ручек, которые «рисуют» в воздухе, таких как 3Doodler. В конечном итоге, они собирались разработать процесс 3D-печати, не подверженный воздействию гравитации.
Вторая стадия проекта – «Разработка печатающей головки». Именно здесь дизайнеры применили подход, радикально отличающийся от общепринятого на сегодняшний день. Их 3D-принтер не печатает наложением слоев друг на друга, а имитирует микроструктуру паутины для создания объектов, поддерживающих собственную конструкцию. Печатающая головка робота оснащена поворотным диском, с помощью которого рабочий механизм раскачивается, придавая нити необходимую структуру, подобно веретену.

Третья фаза – «Разработка системы внешнего цифрового контроля». На этой стадии в процесс были включены роботы, а именно – система на основе аппаратной платформы Arduino. В нее входят четыре сервомеханизма, которые, как обычные 3D-принтеры, управляют подачей материала, в то время как один мотор вращает центральный поворотный диск. Для охлаждения выходящего пластика по системе трубок подается воздух под давлением. Кроме того, каждая из печатных головок оснащена своим собственным программируемым нагревателем для поддержания необходимой рабочей температуры. Все механизмы и устройства управляются с помощью регуляторов на центральной панели системы цифрового контроля.
По словам руководителя проекта, созданный его командой 3D-принтер – это попытка сосредоточиться не только на результатах, но и на процессе производства. Дизайнеры стремились совместить робототехнику и технологии 3D-печати, чтобы создать инструмент, позволяющий воплощать идеи в реальность быстро и без труда, как это делали ремесленники.
Комментарии
(0) Добавить комментарий