
Изучая экспонентов на выставке Robotics-Expo, нас очень заинтересовали разработки, представленные Институтом прикладной математики им. М.В. Келдыша. Хотя они и не выглядели так ярко и не бросались в глаза, как многие экспонаты выставки.
Мне удалось побывать в гостях в робототехнической мастерской, где эти и другие разработки претворяются в жизнь, и пообщаться с одним из разработчиков — инженером-исследователем, кандидатом физико-математических наук, Игорем Орловым.
Robogeek.ru: Здравствуйте, Игорь. Расскажите немного о Вашем институте, какие основные направления в нем развиваются?
Игорь Орлов: Здравствуйте, Ирина. Наш Институт прикладной математики был образован в 1953 году для решения сложных математических проблем. Основные направления на тот момент были связанны с госпрограммами исследования космического пространства, развития атомной и термоядерной энергетики на основе создания и использования вычислительной техники и программного обеспечения. Организатором Института и первым директором (1953–1978 гг.) был президент Академии наук СССР Мстислав Всеволодович Келдыш. С течением времени Институт разрастался, и в итоге в разное время от него отпочковались такие организации РАН, как Институт космических исследований, Институт математического моделирования, Вычислительный центр.
Сейчас в Институте прикладной математики им. М.В.Келдыша существует большое количество направлений исследований: математическое моделирование сложных явлений и конструкций, задачи теоретической и прикладной небесной механики, системное обеспечение ЭВМ и системное прикладное обеспечение и другие. Также есть и робототехническое. На базе института существует лаборатория робототехники, где мы занимаемся двумя основными направлениями: мобильная робототехника и реабилитационная или биомехатроника. Разрабатываем эти направления по грантам Российского фонда фундаментальных исследований.
Одну разработку ведет целая команда, в которую входят аспиранты, кандидаты, доктора, профессора. Причем это могут быть сотрудники не только ИПМ, но и других ВУЗов и институтов: МГУ, МФТИ, МГТУ, РГГУ и др. Например, в рамках работы по направлению биомехатроника с нами также сотрудничают врачи, кандидаты медицинских наук, т. к. в этой разработке много медицинских вопросов.

Robogeek.ru: Игорь, давайте поподробнее поговорим о Вашем проекте «Биомехатроника».
И.О.: Этот проект разрабатывается уже 4 года. Он представляет собой комплекс для реабилитации пациентов, которые потеряли подвижность нижних конечностей по разным причинам или для работы со спортсменами, космонавтами на разных этапах реабилитации. Существующий аналог в мире — швейцарский аппарат Локомат (Lokomat) компании Хокома (Hocoma). Это очень хорошая разработка, используется в комплексной реабилитации не только после спинальных травм, но и детей с ДЦП. Правда у этого аппарата есть несколько минусов, в том числе конструкционных. Однако на данном этапе развития этой области робототехники один из основных недостатков Локомата состоит в том, что он очень дорогой, поэтому таких аппаратов в России мало и на него в буквальном смысле очередь.
Так что направление это очень актуально, им сейчас занимаются во многих странах мира. Очень серьезно занимаются швейцарцы, немцы, итальянцы, американцы, японцы, в Сингапуре, Тайване, Китае. В России также это направление активно развивается, есть несколько компаний и лабораторий, где идут новые разработки и испытания. Среди прочих хотелось бы отметить Региональную Общественную Организацию Инвалидов "ОРБИТА", силами которой была разработана очень неплохая система для локомоторной терапии СЛТ, по некоторым параметрам превосходящая Локомат.
Robogeek.ru: А какой смысл работать в разных местах над одним вопросом — не проще ли объединиться?
И.О.: Каждая лаборатория и компания работает над решением разных задач. Например, разработка команды мeхмата МГУ — Экзоатлет, который был хорошо представлен на выставке Robotics-Expo, предназначен в первую очередь для инвалидов-колясочников, которые лишены возможности ходить. С помощью ЭкзоАтлета пациенты получают возможность ходить, подниматься и спускаться по лестницам, садиться и вставать без посторонней помощи.
Есть еще одно направление в этой же сфере — сервисные роботы-экзоскелеты. Допустим, женщина работает у конвейера. Это монотонная работа, которая предполагает нахождение тела в одном положении длительное время — такая нагрузка тяжела для нашего опорно-двигательного аппарата. Чтобы облегчить ее разрабатываются экзоскелеты, позволяющие разгружать позвоночник, руки, ноги и, соответственно, уменьшать нагрузку на опорно-двигательную систему человека. Такая конструкция будет также весьма полезна для социального работника, который помогает пожилым людям, особенно тем, кто не может сам передвигаться. Такого рода разработки очень актуальны в Японии, где процесс старения населения идет активнее всех.
Что касается нашего проекта, то он предназначен именно для реабилитации людей, перенесших инфаркт, инсульт, травму позвоночника с целью восстановления опорно-двигательного аппарата. Причем медицинскими исследованиями установлено, что чем раньше начинается активная реабилитация, тем больше шансов на полное восстановление функций организма.

Robogeek.ru: А как работает Ваш комплекс? Какие задачи он решает?
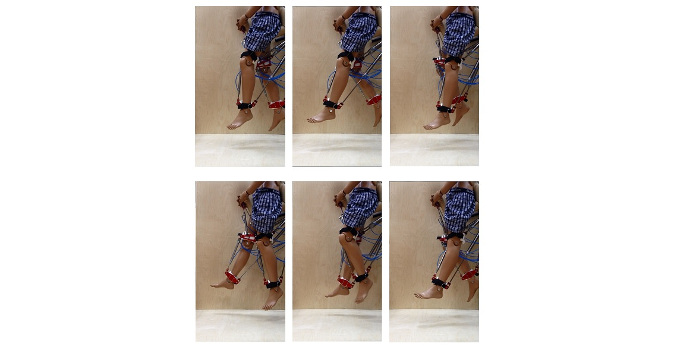
И.О.: Наш биомехатронный комплекс состоит из полукровати-вертикализатора для принудительной вертикализации пациента и выполнении в этом положении несложных упражнений. Смысл полукровати в том, что человека после инсульта в большинстве случаев не получится сразу посадить. Поэтому первые реабилитационные мероприятия начинают проводить еще в положении лежа. Но кровать эта не полноценная (потому и названа полукроватью) — на ней в горизонтальном положении располагается только голова и туловище пациента. Ноги свободно свисают для того, чтобы с ними уже можно было работать и проводить реабилитационные мероприятия. В дальнейшем полукровать можно поднять и зафиксировать в вертикальном положении.

В исходной версии комплекс состоит из тренажера для разработки голеностопного сустава, модуля для стимуляции стопы, включающего стельки с пневмоподушечками для создания имитации опоры, вертикализатора и легопулятора (экзоскелета нижних конечностей) человека. Для разработки отдельных групп мышц и суставов могут применяться как отдельные устройства, так и весь комплекс.
При разработке мы постарались учесть некоторые очень важные параметры, связанные с безопасностью применения и учетом индивидуальных особенностей каждого пациента. Очевидно, что к таким тренажерным комплексам предъявляются строгие требования безопасности, т.к. при отсутствии у пациента чувствительности нижних конечностей, невозможно отследить случайно нанесенный аппаратом ущерб. В связи с этим требуется точная настройка аппарата до использования и обязательное присутствие обратной связи.
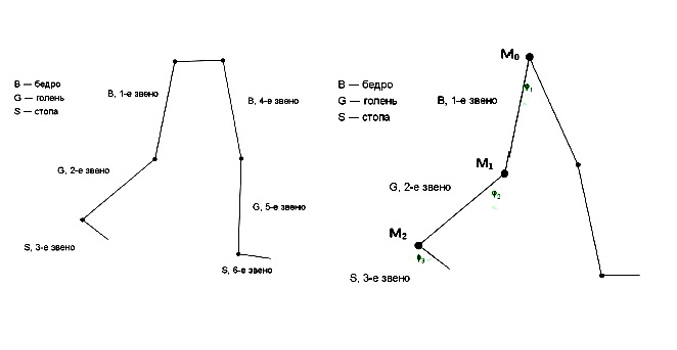
Также важно учитывать расположение осей и максимальные возможности подвижности суставов пациента. Не менее важным вопросом является сохранение правильной походки пациента. К сожалению, для большинства современных реабилитационных аппаратов данная задача пока остается не до конца решенной, вследствие чего многие люди, прошедшие реабилитацию на локомоторных стимуляторах, имеют неправильную походку (без поворота таза вокруг вертикальной оси тела), что значительно усложняет хождение, а также приводит к постепенной деформации тазобедренного сустава.
Кроме того, при настройке описанных аппаратов необходимо учитывать индивидуальные особенности анатомии и физиологии каждого пациента. Так, например, наличие у пациента какого-либо заболевания, снижающего подвижность суставов, делает для него невозможными шагательные движения с большой амплитудой, требующие сгибания коленей и активной работы тазобедренного сустава.
Robogeek.ru: Игорь, последний вопрос — когда Ваша разработка пойдет в массы, т. е. в медицинские учреждения для использования по прямому назначению?
И.О.: Вопрос очень сложный. На данный момент наша разработка доведена до состояния, когда ее можно поставить в больницу (на эту тему уже есть договоренность) для первых клинических испытаний. По окончании испытаний обязательно потребуются доработки, учитывающие пожелания и замечания врачей и пациентов. На этот этап мы отвели для себя весь 2015 год. Далее следует сертификация, которая по нашим прикидкам займет 6-8 месяцев. Таким образом, я думаю, что к 2017 году эта разработка может пойти в массы, по крайней мере мелкой серией. Правда есть тонкий момент с производством, ведь гранты РФФИ подразумевают только исследовательские работы и создание экспериментальных образцов, а организация серийного производства требует больших финансовых вливаний, человеческого ресурса в виде грамотных специалистов и, конечно же, еще времени.
Robogeek.ru: большое спасибо, Игорь, за ответы. Желаем удачи Вашему проекту и ждем рассказ о другой интересной разработке — роботе ManGo.
Комментарии
(0) Добавить комментарий